Designs noise filters and simulates them to show how they attenuate white noise.
------------------------------------------------------------------------
See also CButter, StatePrp, Plot2D, WriteCM
------------------------------------------------------------------------
Contents
Simulation parameters
nSim = 1000;
Filter parameters
tSamp = 0.5;
wCutoff = 0.5;
nOrder = 2;
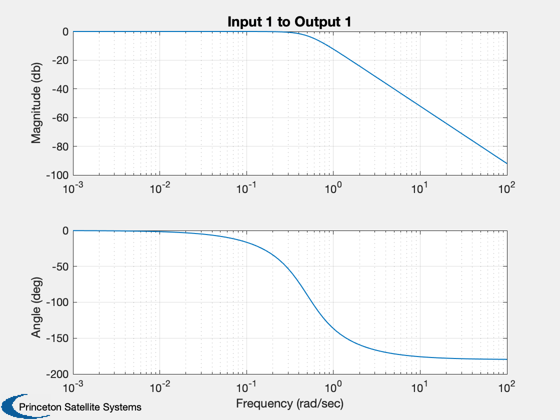
Call like this to get a plot
CButter(nOrder,wCutoff);
Get the discrete time equations
[a,b,c,d] = CButter(nOrder,wCutoff,tSamp,'Delta');
Write in C format
fID = fopen('YawFilterMatrices','w');
WriteCM(fID,'A Matrix','fYawAMatrix',reshape(a',1,length(a)^2),12,20,nOrder)
WriteCM(fID,'B Matrix','fYawBMatrix',b,12,20,nOrder)
WriteCM(fID,'C Matrix','fYawCMatrix',c,12,20,nOrder)
WriteCM(fID,'D Matrix','fYawDMatrix',d,12,20,nOrder)
fclose(fID);
x = zeros(length(a),1);
yPlot = zeros(1,nSim);
u = randn(1,nSim);
for k = 1:nSim
[yPlot(k),x] = StatePrp(a,b,c,d,x,u(k),'Delta');
end
fprintf('Filter Order = %12i \n',nOrder);
fprintf('Filter Cutoff = %12.8f rad/sec\n',wCutoff);
fprintf('Sampling Period = %12.8f sec \n',tSamp);
fprintf('Mean = %12.8f \n',mean(yPlot));
fprintf('Attenuation = %12.8f \n', std(yPlot)/std(u));
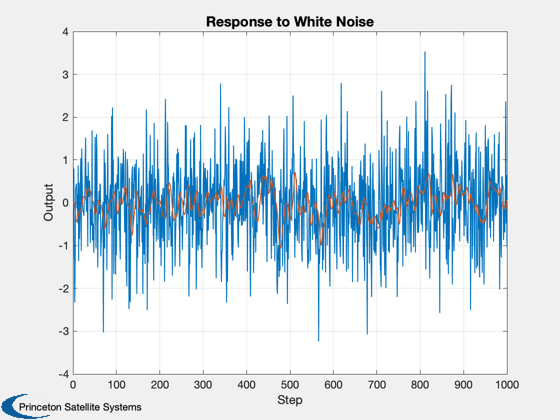
Plot2D(1:nSim,[u;yPlot],'Step','Output','Response to White Noise');
Filter Order = 2
Filter Cutoff = 0.50000000 rad/sec
Sampling Period = 0.50000000 sec
Mean = -0.02519277
Attenuation = 0.29844549