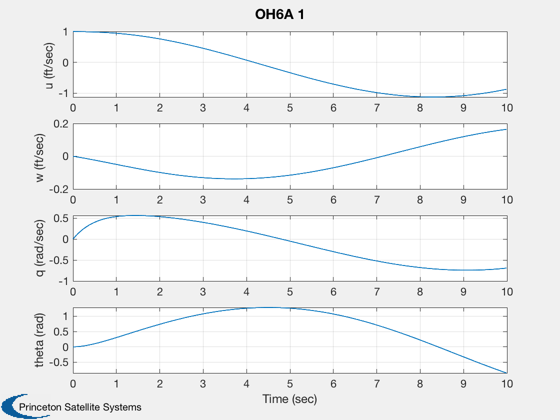
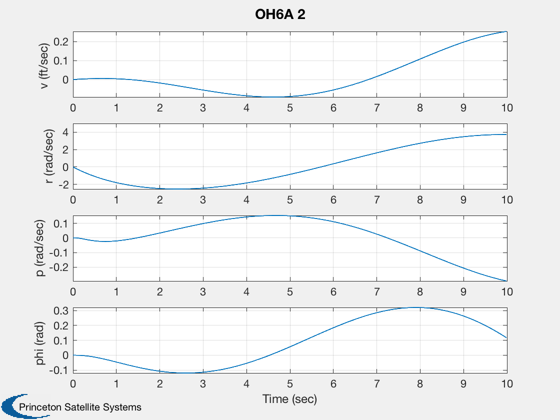
Run a linearized simulation of the OH6A.
------------------------------------------------------------------------
See also StateSpacePlot, DrawAC, HUD, HUDCntrl, OH6A, CToD,
PropStateSpace, Eul2Q, QTForm, TimeGUI
------------------------------------------------------------------------
Contents
Global for the time GUI
global simulationAction
simulationAction = ' ';
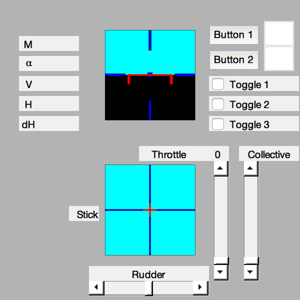
Global for the HUD
global hUDOutput
hUDOutput = struct('pushbutton1',0,'pushbutton2',0,'checkbox1',0,...
'checkbox2',0,'checkbox3',0);
The OH6A state space model
g = OH6A;
disp('Eigenvalues')
eig(get(g,'a'))
Eigenvalues
ans =
-4.9262 + 0i
-2.0103 + 0i
-0.82094 + 0i
0.014268 + 0.51232i
0.014268 - 0.51232i
-0.00013746 + 0.40823i
-0.00013746 - 0.40823i
-0.2294 + 0i
Create a z transform model
g = CToD( g, 0.01, 'zoh' );
Initial state vector
x = [1;0;0;0;0;0;0;0];
HUD state vector
xHUD.v = x(1:3);
xHUD.h = 0;
xHUD.e = [x([8 4]);0];
Set up the HUD
dHUD.atmData = load('AtmData.txt');
dHUD.atmUnits = 'eng';
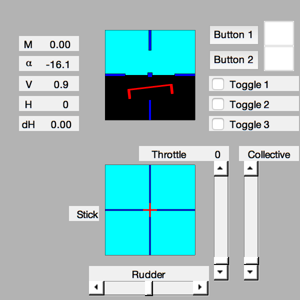
dHUD.type = 'helicopter';
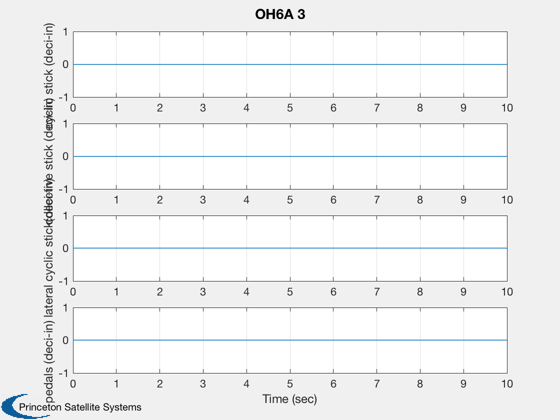
Initial control values
cHUD.control.collective = 0;
cHUD.control.longitudinalCyclic = 0;
cHUD.control.lateralCyclic = 0;
cHUD.control.rudder = 0;
cHUD.control.throttle = 0;
Control ranges
cHUD.collectiveMax = pi/2;
cHUD.longitudinalCyclicMax = pi/2;
cHUD.lateralCyclicMax = pi/2;
cHUD.rudderMax = pi/2;
cHUD.dT = get( g, 'dT' );
Initialize the HUD
hHUD = HUD( 'init', dHUD, xHUD, [], cHUD );
Initialize the plots
nSim = 1000;
plots.x = 1:8;
plots.u = 1:4;
plots.g = g;
dPlot = StateSpacePlot( 'init', plots, nSim, nSim );
Initialize
r = [0;0;1000];
gCobra = load('gCobra');
hCobra = DrawAC( 'init', gCobra, struct('r', r, 'q', [1;0;0;0]), [], dHUD.atmUnits);

Initialize the time display
tToGoMem.lastJD = 0;
tToGoMem.lastStepsDone = 0;
tToGoMem.kAve = 0;
dT = get( g, 'dT' );
[ratioRealTime, tToGoMem] = TimeGUI( nSim, 0, tToGoMem, 0, dT, 'OH6A Simulation' );
for k = 1:nSim
[ratioRealTime, tToGoMem] = TimeGUI( nSim, k, tToGoMem, ratioRealTime, dT );
v = x([1 2 5]);
e = [x([8 4]);0];
omega = [x([7 3]);0];
xHUD.v = v;
xHUD.h = 0;
xHUD.e = e;
q = Eul2Q( e );
hHUD = HUD( 'run', dHUD, xHUD, hHUD, cHUD );
u = [hHUD.control.longitudinalCyclic;...
hHUD.control.collective;...
hHUD.control.lateralCyclic;...
hHUD.control.rudder];
dPlot = StateSpacePlot( 'store', x, [], u, dPlot );
hCobra = DrawAC( 'run', gCobra, struct( 'r', r, 'q', q ), hCobra, dHUD.atmUnits );
x = PropStateSpace( g, x, u );
r = r + dT*QTForm( q, v );
switch simulationAction
case 'pause'
pause
simulationAction = ' ';
case 'stop'
return;
case 'plot'
break;
end
HUDCntrl;
end
Plot the results
StateSpacePlot( 'plot', dPlot );