Contents
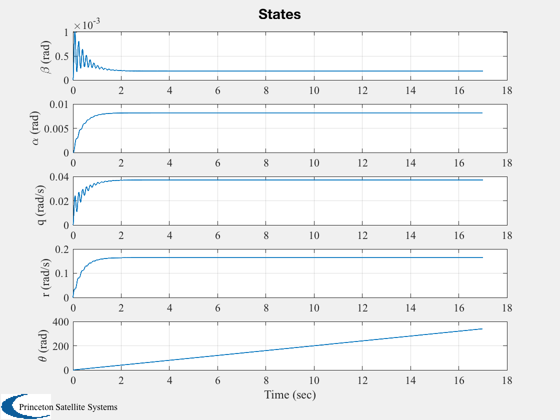
Rolling missile simulation
Initial conditions
d = RHSRollingMissileLinear;
tEnd = 17;
dT = 0.001;
n = ceil(tEnd/dT);
x = zeros(5,1);
xP = zeros(size(x,1)+2,n);
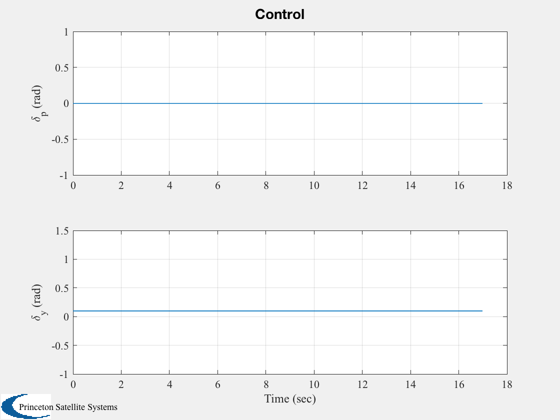
d.deltaY = 0.1;
Simulation
for k = 1:n
xP(:,k) = [x;d.deltaP;d.deltaY];
x = RK4(@RHSRollingMissileLinear,x,dT,0,d);
end
[t,tL] = TimeLabl((0:n-1)*dT);
yL = {'\beta (rad)' '\alpha (rad)' 'q (rad/s)' 'r (rad/s)' ...
'\theta (rad)' '\delta_p (rad)' '\delta_y (rad)'};
Plot2D(t,xP(1:5,:),tL,yL(1:5),'States');
Plot2D(t,xP(6:7,:),tL,yL(6:7),'Control');