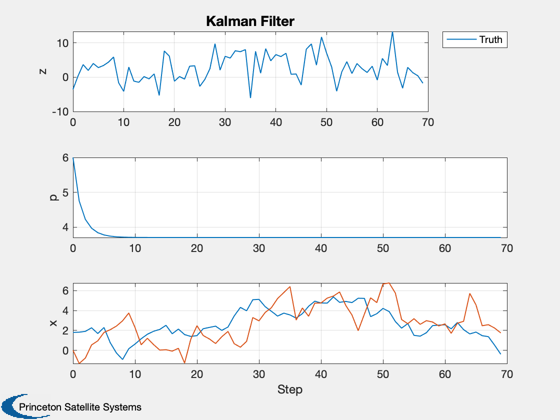
Discrete time Kalman filter
Model is a single integrator.
%-------------------------------------------------------------------------- % Copyright (c) 2020 Princeton Satellite Systems, Inc. % All rights reserved. %-------------------------------------------------------------------------- % Since 2020.1 %-------------------------------------------------------------------------- n = 70; % Number of steps p0 = 6; % Initial covariance r = 10; % Measurement noise q = 1; % Plant noise h = 1; % Measurement matrix phi = 1; % State transition matrix gamma = 1; % Input matrix x = 1; % Initial state xE = 0; % Estimated state u = 0; % Input p = p0; xP = zeros(4,n); for j = 1:n % Truth model z = h*x + sqrt(r)*randn; % Measurement x = phi*x + gamma*u + sqrt(q)*randn; % Store variables to plot xP(:,j) = [z;p;x;xE]; % Kalman Filter k = p*h'/(h*p*h' + r); xE = xE + k*(z - h*xE); p = (1 - k*h)*p; % Measurement update of covariance xE = phi*xE + gamma*u; p = phi*p*phi' + gamma*q*gamma'; end yL = {'z' 'p' 'x'}; Plot2D(0:n-1,xP,'Step',yL,'Kalman Filter','lin',{'1' '2' '[3 4]'}); legend('Truth','Estimate','location','bestoutside') %-------------------------------------- % $Date$ % $Id: e70f63d3c6c632e441dd4328ade4adf184b821d0 $
Warning: Ignoring extra legend entries.