Contents
SCARA Robot Demo
Demonstrate the the SCARA robot arm. -------------------------------------------------------------------------
% Reference: Tsai, "Robot Analysis," Example 9.8.2, p. 405. %--------------------------------------------------------------------------
%-------------------------------------------------------------------------- % Copyright (c) 1999, 2013 Princeton Satellite Systems, Inc. % All rights reserved. %--------------------------------------------------------------------------
Initialize
%------------ % Simulation time control %------------------------ tEnd = 10; nTest = 4; dT = 0.025; nSim = tEnd/dT+1; % Constants %---------- gC = 9.806; % Robot parameters %----------------- a = [3 2 1]; m = [4 6 1]; % Assembly information data structure %------------------------------------ inertia = cell(3); for k = 1:2 inertia{k} = m(k)*a(k)^2*diag([0 1 1])/12; end inertia{3} = m(3)*a(3)^2*diag([1 1 0])/12; % Vectors from the hinges to the cm of each body %----------------------------------------------- c = zeros(3,3); r = zeros(3,3); for k = 1:2 c(:,k) = [ 0; a(k)/2;0]; r(:,k) = [ 0; a(k); 0]; end c(:,3) = [0;0;0]; r(:,3) = [0;0;a(3)/2]; % Transformation matrices %------------------------ R1 = eye(3); R2 = eye(3); R3 = [0 1 0;1 0 0;0 0 -1]; % Sliding friction data %---------------------- cF = struct('fStatic', [0;0;0],'kStatic', [1;1;1],... 'fCoulomb',[0;0;0],'kCoulomb',[1;1;1],... 'bViscous',[0;0;0]); % The initialization function uses parameter pairs. The ones starting with % name are links. Entering name creates a new link. All link parameters % must be specified before the next name %------------------------------------------------------------------------- h = RHSRobotInitialize( 'robot name','Robot',... 'gravity vector', [0;0;-9.806],... 'friction function','FrictionSmooth',... 'friction data',cF,... 'name','Link1','mass',4,'radius',0.2,... 'center of mass',c(:,1),'parent',0,'state',1,... % Link 1 'link vector',r(:,1),'inertia',inertia{1},'hinge','revolute',... 'transformation matrix',R1,... 'name','Link2','mass',6,'radius',0.2,... 'center of mass',c(:,2),'parent',1,'state',2,... % Link 2 'link vector',r(:,2),'inertia',inertia{2},'hinge','revolute',... 'transformation matrix',R2,... 'name','Link3','mass',1,'radius',0.2,'center of mass',c(:,3),'parent',2,'state',3,... % Link 3 'link vector',r(:,3),'inertia',inertia{3},'hinge','prismatic',... 'transformation matrix',R3);
Simulation
%------------ x = [.4; 1.2; 0.2; 0.3; 0.4; 0.1]; % Run the simulation %------------------- t = dT*(0:(nSim-1)); xPlot = zeros(length(x),nSim); for k = 1:nSim % Plotting array %--------------- xPlot(:,k) = x; % Enter the motor torques into the dynamics model %----------------------------------------------- x = RK4( 'RHSRobot', x, dT, t(k), h ); end
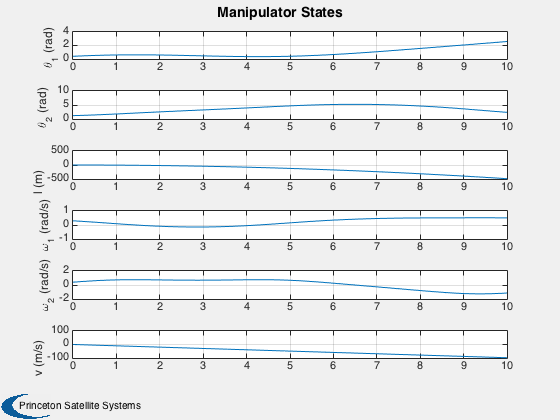
Plot the results
%------------------ % Plot labels %------------ yL = {'\theta_1 (rad)' '\theta_2 (rad)' 'l (m)' '\omega_1 (rad/s)' '\omega_2 (rad/s)' 'v (m/s)'}; [t,tL] = TimeLabl(t); Plot2D( t, xPlot, t, yL, 'Manipulator States' ); DrawSCARA( 'initialize' ); DrawSCARA( 'update', [xPlot;zeros(1,nSim)] ); %-------------------------------------- % PSS internal file version information %--------------------------------------