Coarse probability demo
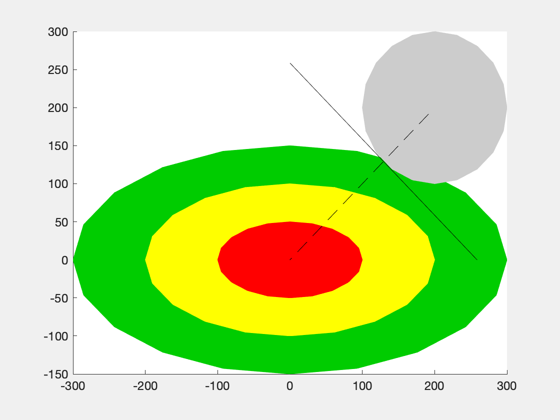
CoarseProp.m computes a collision probability estimate consisting of the integral outbound of the tangent between a circular avoidance region and the target's position probability density. The formulation is demonstrated using a set of plots to show the underlying probability function, the computation of the index and probabilityfor various realistic ratios of the collision parameters, and a visualization of the integral region.
Since version 7. ------------------------------------------------------------------------- Reference: J. Russell Carpenter, 'Conservative Analytical Collision Probability for Design of Orbital Formations', 2004 -------------------------------------------------------------------------
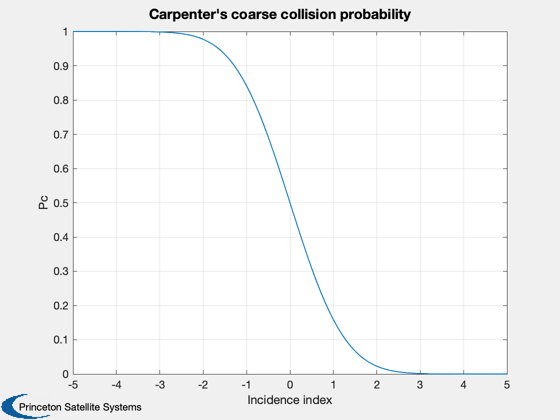
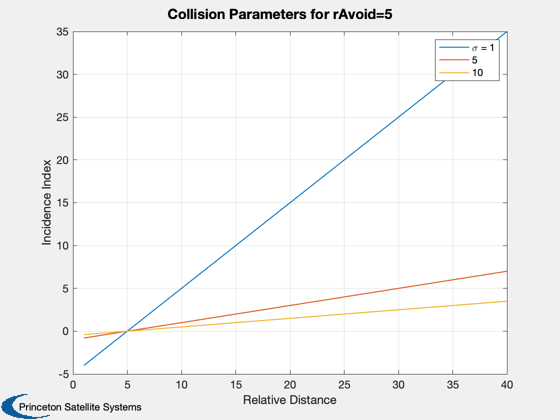
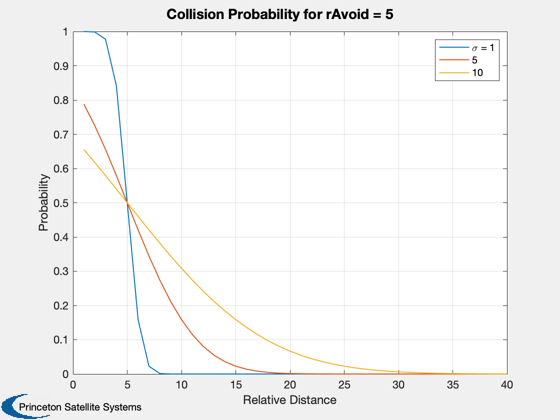
%-------------------------------------------------------------------------- % Copyright 2011 Princeton Satellite Systems, Inc. All rights reserved. %-------------------------------------------------------------------------- % The underlying probability function is based on erf k = -5:0.1:5; Pc = 0.5 - 0.5*erf(k/sqrt(2)); Plot2D(k,Pc,'Incidence index','Pc','Carpenter''s coarse collision probability'); % The incidence function k = []; dR = 1:40; rAvoid = 5; sigmaU = 1; k(:,1) = (dR - rAvoid)/sigmaU; sigmaU = 5; k(:,2) = (dR - rAvoid)/sigmaU; sigmaU = 10; k(:,3) = (dR - rAvoid)/sigmaU; Plot2D(dR,k,'Relative Distance','Incidence Index','Collision Parameters for rAvoid=5'); legend('\sigma = 1','5','10') % Compute the probability for the same values Pc = []; for k = 1:length(dR) Pc(1,k) = CoarseProb( dR(k), rAvoid, 1); Pc(2,k) = CoarseProb( dR(k), rAvoid, 5); Pc(3,k) = CoarseProb( dR(k), rAvoid, 10); end Plot2D(dR,Pc,'Relative Distance','Probability','Collision Probability for rAvoid = 5'); legend('\sigma = 1','5','10') rRel = [200; 200]; sigma = diag([100 50]); rAvoid = 100; CoarseProb( rRel, rAvoid, sigma) %-------------------------------------- % PSS internal file version information %--------------------------------------
ans =
0.010367