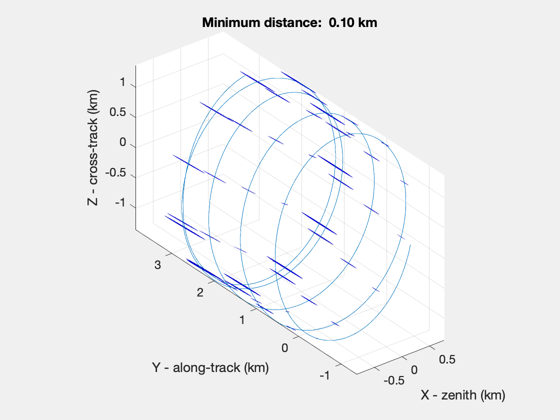
Collision monitoring demo.
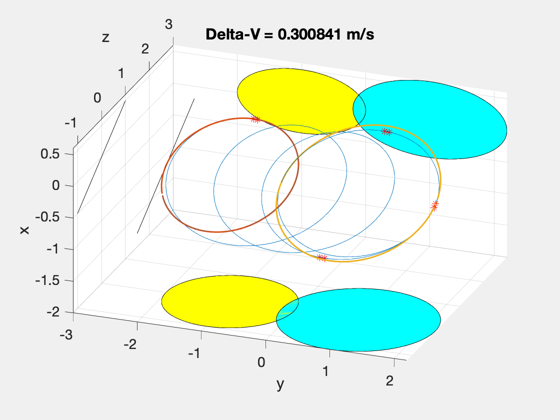
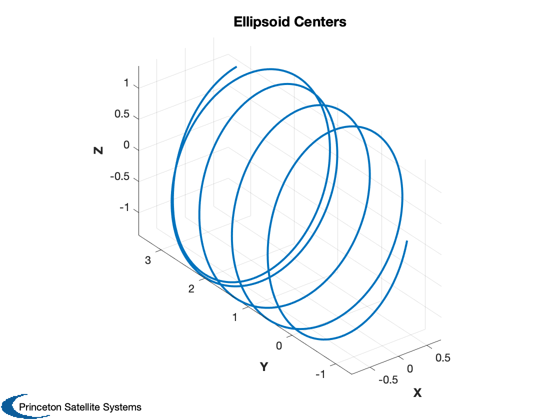
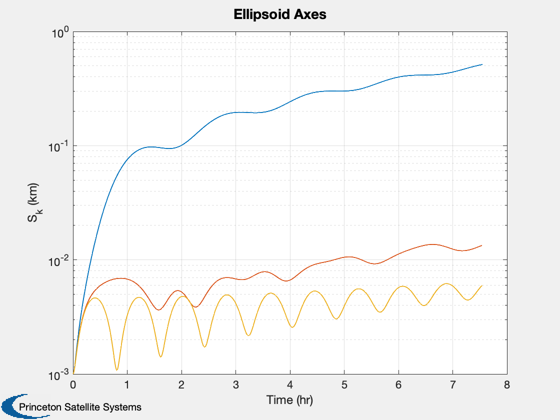
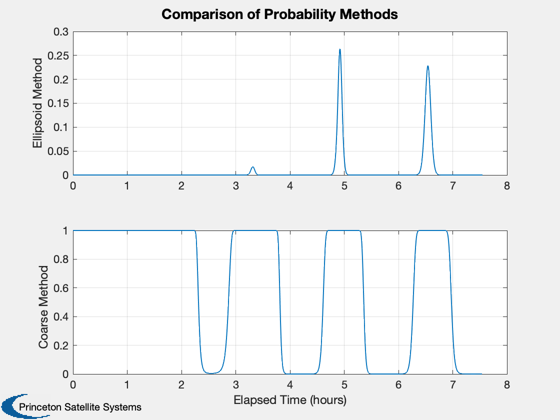
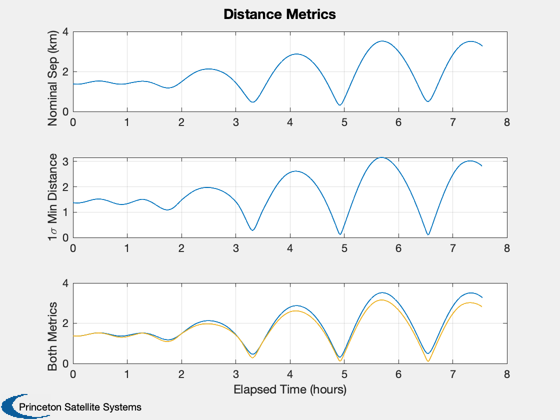
Compare CollisionSurvey and coarse methods. Note how the ellipsoids lengthen along-track over the propagation.
Since version 7.
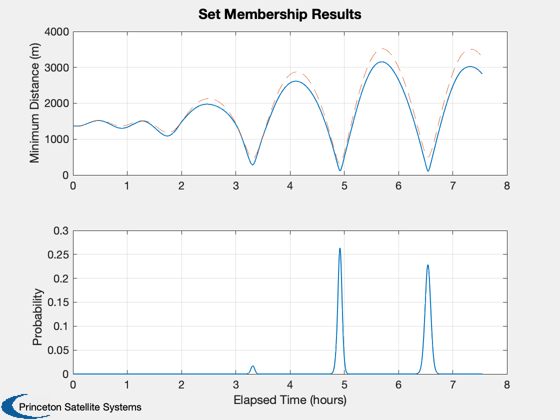
%------------------------------------------------------------------------------- %------------------------------------------------------------------------------- % Copyright 2005 Princeton Satellite Systems, Inc. All rights reserved. %------------------------------------------------------------------------------- % Setup plausible conditions [dColl, y, mvr1, mvr2] = CollisionInit(1); % Increase the initial error so we can see results on the scale of the % trajectory dColl.S0 = 100*dColl.S0; % 3-sigma ellipsoids d.scalev = 3; disp('First calculate 3-sigma distances and probabilities...') tic [prob, dMin, xhat, Shat, tProp] = CollisionSurvey(dColl,0,[y(:,2)-y(:,1)],mvr1,mvr2); toc % plot algorithm results Plot2D([tProp-tProp(1)]/3600,[1000*cell2mat(dMin);cell2mat(prob)],'Elapsed Time (hours)',... char({'Minimum Distance (m)','Probability'}),'Set Membership Results'); subplot(2,1,1); hold on; plot([tProp-tProp(1)]/3600,1000*Mag(xhat{1}(1:3,:)),'--') Plot3D(xhat{1}(1:3,:),'X','Y','Z','Ellipsoid Centers'); axis equal; view(3) S = zeros(3,length(tProp)); for k = 1:length(tProp) S(:,k) = sqrt(svd(Shat{1}(1:3,1:3,k))); end Plot2D(tProp/3600,S,'Time (hr)','S_{k} (km)','Ellipsoid Axes','ylog'); %------------------------------------------- % Comparison to Carpenter's 'coarse' method %------------------------------------------- % 1-sigma ellipsoids d.scalev = 1; disp('Calculate 1-sigma ellipsoids...') [prob1, dMin1, xhat1, Shat1, tProp1] = CollisionSurvey(dColl,0,[y(:,2)-y(:,1)],mvr1,mvr2); xHill = {}; nu0 = M2NuAbs(dColl.eRef,dColl.MRef); nuF = M2NuAbs(dColl.eRef,dColl.MRef+dColl.rate*tProp); xHill{1} = FFEccLawdensEqns( y(:,1), nu0, nuF, dColl.eRef, dColl.rate ); xHill{2} = xhat1{1}; % coarse probability disp('Coarse probability method, using ellipsoids...'); [r0,v0] = RVFromKepler(dColl.el0,tProp-tProp(1)); xInertial = zeros(size(xhat1{1})); SInertial = zeros(size(Shat1{1})); rRel = zeros(1,length(tProp)); SConj = zeros(3,3,length(tProp),2); for k = 1:length(tProp) [A, Adot] = GetHillsMats( r0(:,k), v0(:,k) ); Bhe = inv([A zeros(3,3); Adot A]); for n = 1:2 xInertial(:,k,n) = Bhe*xHill{n}(:,k); SInertial(:,:,k,n) = Bhe*Shat1{1}(:,:,k)*Bhe'; end end probC = zeros(1,length(tProp)); for k = 1:length(tProp) % transform to conjunction plane xRel = xInertial(:,k,2) - xInertial(:,k,1); rRel = Mag(xRel(1:3)); C = ConjunctionPlane( xRel ); SConj1 = C'*SInertial(1:3,1:3,k,1)*C; SConj2 = C'*SInertial(1:3,1:3,k,2)*C; beta = 1/(1+sqrt(trace(SConj1)/trace(SConj2))); Se = SConj1/(1-beta) + SConj2/beta; Se = SConj2; % compute probability rAvoid = dColl.lenSC/2; sigmaU = sqrt(SConj2(1,1)); probC(k) = CoarseProb(rRel,rAvoid,sigmaU); end % Plot results of the two methods tPlot = [tProp-tProp(1)]/3600; Plot2D(tPlot,[prob{1};probC],'Elapsed Time (hours)',... char({'Ellipsoid Method','Coarse Method'}),'Comparison of Probability Methods'); dNom = Mag(xhat1{1}(1:3,:)); Plot2D(tPlot,[dNom;dMin1{1};dMin{1}],'Elapsed Time (hours)',... char({'Nominal Sep (km)','1\sigma Min Distance','Both Metrics'}),'Distance Metrics','lin',['[1] ';'[2] ';'[1 2 3]']); subplot(3,1,1) [dNomM,iMin] = min(dNom); text(tPlot(iMin)+0.2,70,sprintf('d_{min} = %5.1f',dNomM)); subplot(3,1,2) [dMinM,iMin] = min(dMin1{1}); text(tPlot(iMin)+0.2,70,sprintf('d_{min} = %5.1f',dMinM)); % 3D Plotting of ellipsoids ViewEllipsoid( xhat, Shat, dMin ) %-------------------------------------- % PSS internal file version information %--------------------------------------
First calculate 3-sigma distances and probabilities... Elapsed time is 0.189920 seconds. Calculate 1-sigma ellipsoids... Coarse probability method, using ellipsoids...