Demonstrate the different solutions found by the optimal assignment method and the privileged assignment method.
Since version 7. ------------------------------------------------------------------------ Form: AssignmentDemo ------------------------------------------------------------------------ See also RotateState, TeamGoals_Structure, EstimateCost, GenerateTeamGoals, InitializeCostMatrix, OptimalAssignment, PopulateCostMatrix, PrivilegedAssignment, SetupAssignmentProblem, Goals2DeltaElem, DataSize ------------------------------------------------------------------------
Contents
- reference orbit
- element differences for relative satellites
- initial team motion
- ID's of relative spacecraft
- remaining fuel percentage
- fuel weighting factor
- weight
- desired team motion
- the time window
- compute initial state and desired team goals
- compute the cost estimates for each spacecraft
- define the assignment problem parameters
- create the cost matrix
- use the privileged assignment method (minimum metric)
- use the privileged assignment method (mean metric)
- use the optimal assignment method
------------------------------------------------------------------------- Copyright 2003 Princeton Satellite Systems, Inc. All rights reserved. -------------------------------------------------------------------------
clear power; clear costEstimate; fprintf('\nSetting up problem...\n'); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%% BEGIN USER - DEFINED INFO %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Setting up problem...
reference orbit
%----------------
el0 = [6928.14, 0, 35.4*pi/180, 0, 0, 0];
element differences for relative satellites
%--------------------------------------------
nSC = 8;
initial team motion
%--------------------
fType_init = 2;
fSize_init = 0.2;
ID's of relative spacecraft
%----------------------------
relIDs = [31 44 28 19 93 67 52 17];
remaining fuel percentage
%--------------------------
rfp = [.9 .8 .7 .6 .5 .4 .3 .2];
rfp = [.2 .3 .4 .5 .6 .7 .8 .9];
fuel weighting factor
%----------------------
x = 1;
weight
%-------
weight = power(rfp,-x);
desired team motion
%--------------------
fType_des = 5;
fSize_des1 = 0.5; nSC1 = floor(nSC/2);
fSize_des2 = 1.0; nSC2 = nSC - nSC1;
the time window
%---------------- window.startTime = 0; window.nOrbMin = 1; window.nOrbMax = 3; %%%%%%% END OF USER - DEFINED INFO %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% fprintf('\nGenerating team goals...\n');
Generating team goals...
compute initial state and desired team goals
%--------------------------------------------- tG0 = GenerateTeamGoals( el0, fType_init, fSize_init, nSC, [], [] ); dEl = []; k = 0; for i=1:tG0.nU, k = k + 1; geom = tG0.geometry(i); dEl(k,:) = Goals2DeltaElem( el0, geom ); for j=1:tG0.constraints(i).nDuplicates k = k+1; phase = tG0.constraints(i).phase(j); dEl(k,:) = Goals2DeltaElem( el0, RotateState(geom,phase) ); end end teamGoals1 = GenerateTeamGoals( el0, fType_des, fSize_des1, nSC1, 99, 5*pi/180 ); teamGoals2 = GenerateTeamGoals( el0, fType_des, fSize_des2, nSC2, 99, 5*pi/180 ); teamGoals = TeamGoals_Structure; teamGoals.nU = teamGoals1.nU + teamGoals2.nU; teamGoals.geometry = [teamGoals1.geometry, teamGoals2.geometry ]; teamGoals.constraints = [teamGoals1.constraints, teamGoals2.constraints]; ds0 = DataSize(teamGoals); fprintf('\nEstimating cost for each spacecraft...\n');
Estimating cost for each spacecraft...
compute the cost estimates for each spacecraft
%----------------------------------------------- for i=1:nSC costEstimate(i) = EstimateCost( el0, dEl(i,:), teamGoals, relIDs(i), window, weight(i) ); end
define the assignment problem parameters
%----------------------------------------- [N,M,P,Pu,Q,phi,u] = SetupAssignmentProblem( teamGoals ); fprintf('\nPopulating cost matrix...\n');
Populating cost matrix...
create the cost matrix
%----------------------- f = InitializeCostMatrix( teamGoals, length(relIDs) ); for i=1:N f = PopulateCostMatrix( f, costEstimate(i), teamGoals, relIDs ); end fprintf('\nPrivileged assignment method (min metric)...\n');
Privileged assignment method (min metric)...
use the privileged assignment method (minimum metric)
%------------------------------------- tic [order1,phi1,cost1,cv1] = PrivilegedAssignment( N, P, Pu, Q, f, phi, u, 1 ); t1 = toc; fprintf('\nPrivileged assignment method (mean metric)...\n');
Privileged assignment method (mean metric)...
use the privileged assignment method (mean metric)
%------------------------------------- tic [order2,phi2,cost2,cv2] = PrivilegedAssignment( N, P, Pu, Q, f, phi, u, 2 ); t2 = toc; fprintf('\nOptimal assignment method...\n');
Optimal assignment method...
use the optimal assignment method
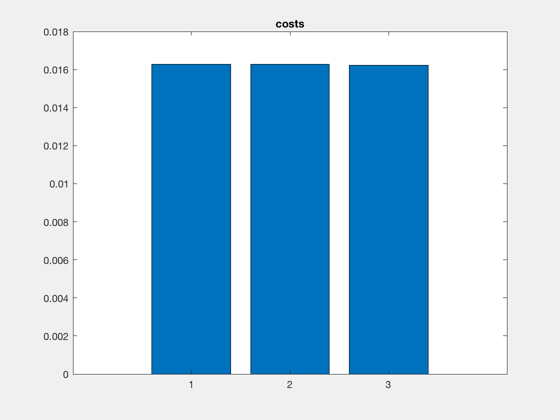
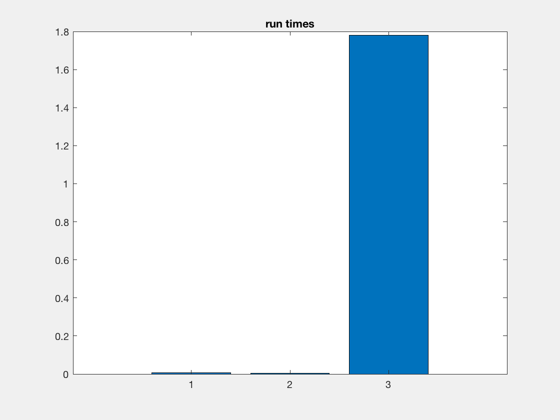
%---------------------------------- tic [order3,phi3,cost3,cv3] = OptimalAssignment( N, P, Pu, Q, f, phi, u ); t3 = toc; fprintf('\nPlotting...\n'); figure, bar([cost1,cost2,cost3]), title('costs') figure, bar([t1,t2,t3]), title('run times') cost1uw = sum( cv1 ./ weight(order1) ); cost2uw = sum( cv2 ./ weight(order2) ); cost3uw = sum( cv3 ./ weight(order3) ); costSavings32UW = abs(cost3uw-cost2uw)/cost2uw*100; costSavings31UW = abs(cost3uw-cost1uw)/cost1uw*100; costSavings32 = abs(cost3-cost2)/cost2*100; costSavings31 = abs(cost3-cost1)/cost1*100; for i=1:nSC costVec1(order1(i)) = cv1(i); costVec2(order2(i)) = cv2(i); costVec3(order3(i)) = cv3(i); end costVec1UW = costVec1 ./ weight; costVec2UW = costVec2 ./ weight; costVec3UW = costVec3 ./ weight; %--------------------------------------
Plotting...