Contents
Demonstrate rendezvous control with PD or LQ
This allows for both a PD controller and LQ (linear quadratic) controller. Both work in continuous time. Script contains an embedded RHS function.
See also LinOrb, QCR, Riccati, DispWithTitle, TimeLabl, RK4, Odd
%-------------------------------------------------------------------------- % Copyright (c) 2020 Princeton Satellite Systems, Inc. % All rights reserved. %--------------------------------------------------------------------------
Constants
m = 1000; dT = 1; d.n = 2*pi/(90*60); useLQ = true;
Design a quadratic regulator
[a, b] = LinOrb( [], d.n ); kLQ = QCR( a, b, eye(6), 1e5*eye(3) ); DispWithTitle(kLQ,'Gain Matrix LQ') DispWithTitle(eig(a-b*kLQ),'LQ eigenvalues')
Gain Matrix LQ
0.003165 -9.2471e-05 -3.2574e-19 0.079624 7.462e-07 -1.4935e-18
9.2471e-05 0.0031609 -5.3816e-19 7.462e-07 0.079573 -1.041e-17
1.1592e-20 -3.251e-19 0.0031609 1.9551e-19 -3.3105e-18 0.079573
LQ eigenvalues
-0.039801 + 0.040891i
-0.039801 - 0.040891i
-0.039798 + 0.038564i
-0.039798 - 0.038564i
-0.039786 + 0.039741i
-0.039786 - 0.039741i
Design a PD controller
zeta = 1; omega = 0.06; % Omega must be faster than n kPD = [omega^2*eye(3) 2*zeta*omega*eye(3)]; DispWithTitle(kPD,'Gain Matrix PD') DispWithTitle(eig(a-b*kLQ),'PD eigenvalues')
Gain Matrix PD
0.0036 0 0 0.12 0 0
0 0.0036 0 0 0.12 0
0 0 0.0036 0 0 0.12
PD eigenvalues
-0.039801 + 0.040891i
-0.039801 - 0.040891i
-0.039798 + 0.038564i
-0.039798 - 0.038564i
-0.039786 + 0.039741i
-0.039786 - 0.039741i
Simulation
x = [1;1;1;0.01;0.01;0.01]; xP = zeros(9,m); for k = 1:m if( useLQ) d.aD = -kLQ*x; %#ok<*UNRCH> else d.aD = -kPD*x; end xP(:,k) = [x;d.aD]; x = RK4( @RHS, x, dT, 0, d ); end
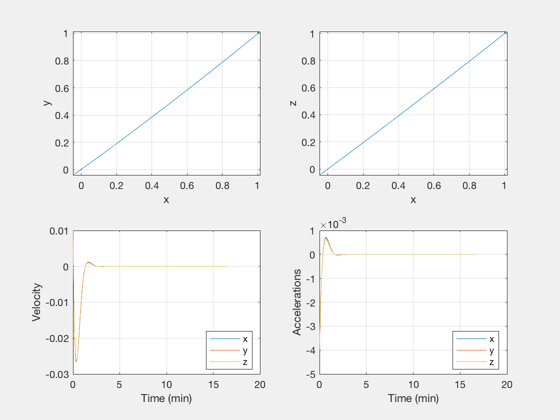
Plotting
t = (0:m-1)*dT; h = figure; if( useLQ ) s = 'Rendezvous LQ Controller'; else s = 'Rendezvous PD Controller'; end set(h,'name',s) subplot(2,2,1) plot(xP(1,:),xP(2,:)) grid on xlabel('x'); ylabel('y') subplot(2,2,2) plot(xP(1,:),xP(3,:)) grid on xlabel('x'); ylabel('z') [t,tL] = TimeLabl(t); subplot(2,2,3) plot(t,xP(4:6,:)) grid on xlabel(tL); ylabel('Velocity') legend('x','y','z','location','best') subplot(2,2,4) plot(t,xP(7:9,:)) grid on xlabel(tL); ylabel('Accelerations') legend('x','y','z','location','best')
Hills equations
function xDot = RHS(x,~,d) nSq = d.n^2; xDot = [x(4:6);d.aD+[2*d.n*x(5)+3*nSq*x(1);-2*d.n*x(4);-nSq*x(3)]]; end %--------------------------------------