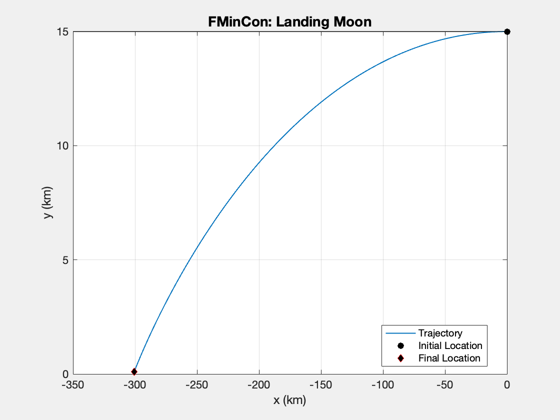
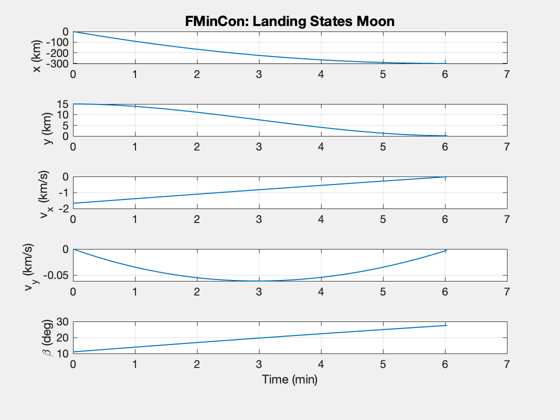
Compute a minimum time landing trajectory using fmincon
The test is for a lunar landing in 2D. The surface is assumed flat. The acceleration is constant. Start from zero angles.
Requires fmincon from the MATLAB Optimization Toolbox.
See also: Constant, Simulate2DLanding, LandingCost2D, LandingConst2D
Contents
%-------------------------------------------------------------------------- % Copyright (c) 2021 Princeton Satellite Systems, Inc. % All rights reserved. %-------------------------------------------------------------------------- % Since version 2021.1 %-------------------------------------------------------------------------- if( ~HasOptimizationToolbox ) error('You need the MATLAB optimizaton toolbox to run this script.'); end
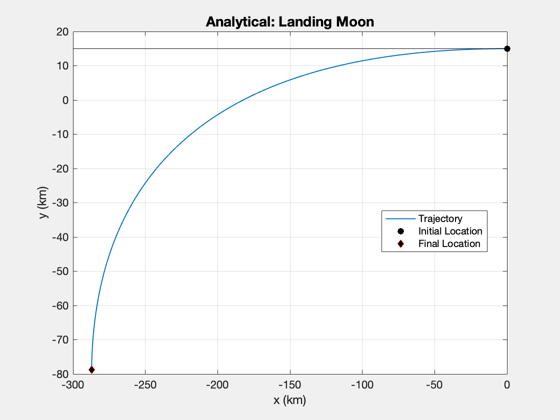
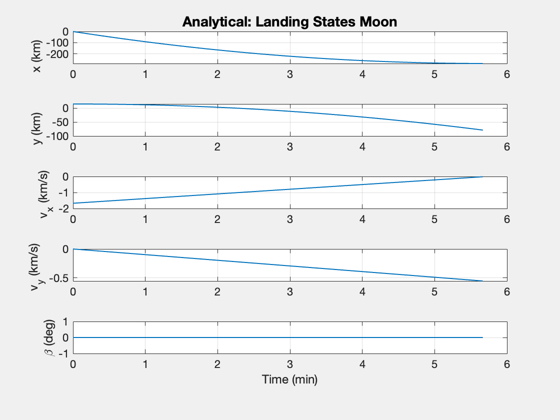
Parameters
muMoon = Constant('mu moon'); rMoon = Constant('equatorial radius moon'); d = struct; d.n = 100; % Number of increments d.g = muMoon/rMoon^2; % Gravity d.a = 3*d.g; % Engine acceleration h = 15; % km % Thrust direction angles, start with zero beta = zeros(1,d.n); % The initial state is [0;h;-u;0] r = rMoon + h; x = [0;h;-sqrt(muMoon/r);0]; tMin = abs(x(3))/d.a; t = linspace(0,tMin,d.n+1); d.x = x; d.hFinal = 0.1; % Simulate the landing Simulate2DLanding( t, beta, d, 'Analytical' );
Now repeat with fmincon
% fmincon options opts = optimset('Display','iter-detailed',... 'TolFun',1e-4,... 'algorithm','interior-point',... 'TolCon',1e-5,... 'MaxFunEvals',10000); % Pass the initial state to the optimizer d.x = x; % The cost is time, which is a decision variable % The cost is the time to reach the final state vector costFun = @(x) LandingCost2D(x,d); % The numerical integration of the state is in the constraint function constFun = @(x) LandingConst2D(x,d); % The final state vector is [x;0;0;0]; % We don't care what x is since we can always start the descent at the % appropriate time. % First guess for the time decision variable dT = t(2:end) - t(1:end-1); % The decision variables are acceleration angle and time increment u0 = [beta';dT']; % Lower and upper bounds lB = [-(pi/2)*ones(length(dT),1);zeros(length(dT),1)]; uB = [(pi/2)*ones(length(dT),1);100*ones(length(dT),1)]; % Find the optimal decision variables. u = fmincon(costFun,u0,[],[],[],[],lB,uB,constFun,opts);
First-order Norm of
Iter F-count f(x) Feasibility optimality step
0 201 3.434516e+02 8.083e+01 2.301e-06
1 402 3.434516e+02 1.288e+00 1.171e+00 3.452e+00
2 603 3.656850e+02 3.730e-01 2.252e-01 2.229e+00
3 804 3.656580e+02 2.840e-02 2.023e-01 2.740e-01
4 1005 3.656738e+02 1.243e-02 9.136e-02 1.846e-01
5 1206 3.657437e+02 1.729e-04 1.888e-02 2.281e-02
6 1407 3.657436e+02 1.012e-04 3.439e-04 1.587e-02
7 1608 3.657441e+02 9.527e-07 1.455e-03 1.514e-03
8 1809 3.657441e+02 5.146e-07 1.834e-04 1.142e-03
9 2010 3.657441e+02 6.149e-09 1.264e-04 1.246e-04
10 2211 3.657441e+02 3.513e-09 3.668e-05 9.394e-05
Optimization completed: The relative first-order optimality measure, 3.668402e-05,
is less than options.OptimalityTolerance = 1.000000e-04, and the relative maximum constraint
violation, 4.345736e-11, is less than options.ConstraintTolerance = 1.000000e-05.
Set up the simulation
beta = u(1:d.n)'; dT = u(d.n+1:2*d.n); t = zeros(1,length(dT)); for k = 2:d.n+1 t(k) = t(k-1) + dT(k-1); end % Simulate the landing Simulate2DLanding( t, beta, d, 'FMinCon' ); %-------------------------------------- % $Id: 39517411025e420dc8378b74d7c4215f0d64649d $