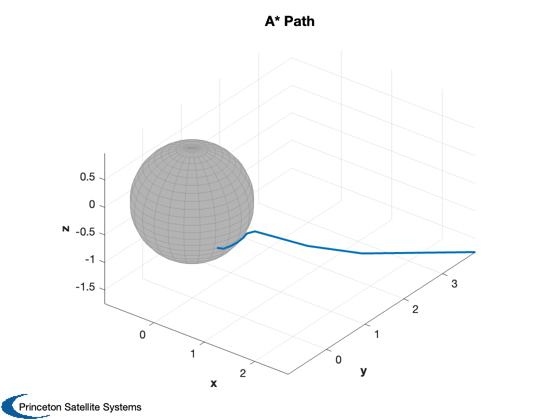
Demonstrate A* for a close orbital maneuver.
------------------------------------------------------------------------
See also AStarSearch, ManeuverCost3D, ManeuverSuccessorNodes3D,
GenerateGrid, RaDec2U, Plot2D, Plot3D
------------------------------------------------------------------------
Contents
Define the grid
n = 48;
r = [1 1.1 2 3 5 8];
stayout = [];
[rA, dec, a, kDec, kR, r, nPL] = GenerateGrid( n, r, stayout, 'globe' );
d = [];
d.myData.dec = dec;
d.myData.rA = rA;
d.myData.r = r;
d.myData.a = a;
d.myData.kDec = kDec;
d.myData.kR = kR;
d.myData.n = length(a);
d.myData.v = [1;0;0];
d.n = length(a);
d.myData.nPL = nPL;
startNode = 5100;
endNode = 390;
We use the same function for path cost and maneuver cost
d.pathCostEstimateFunction = 'ManeuverCost3D';
d.traverseCostFunction = 'ManeuverCost3D';
d.successorNodesFunction = 'ManeuverSuccessorNodes3D';
path = AStarSearch( startNode, endNode, d );
Plot the path if one was successfully generated
if( ~isempty(path) )
rA = d.myData.rA(path);
dec = d.myData.dec(path);
r = d.myData.r(path);
uPath = RaDec2U( rA*pi/180,dec*pi/180 );
rPath = zeros(3,size(uPath,2));
for k = 1:size(uPath,2)
rPath(:,k) = r(k)*uPath(:,k);
end
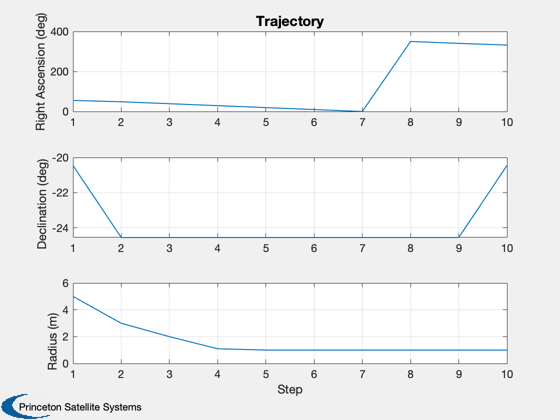
yL = {'Right Ascension (deg)', 'Declination (deg)' 'Radius (m)'};
Plot3D( rPath,'x','y','z','A* Path', 0.98 );
Plot2D( 1:length(rA), [rA;dec;r], 'Step', yL, 'Trajectory' );
end