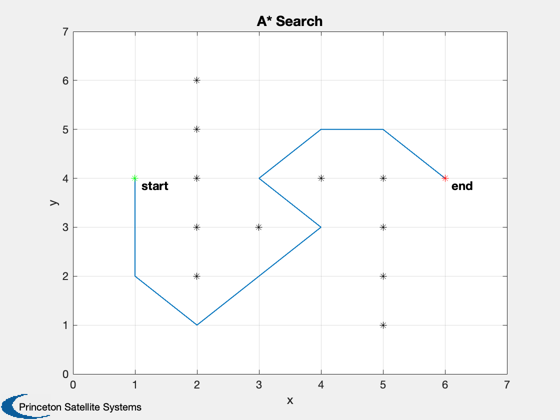
Test AStarSearch using a grid with obstacles.
------------------------------------------------------------------------
See also AStarSearch, TransformGridCoordinates, Plot2D, TextS
------------------------------------------------------------------------
Contents
n = 6;
d.pathCostEstimateFunction = 'GridPathCost';
d.traverseCostFunction = 'GridTraverseCost';
d.successorNodesFunction = 'GridSuccessorNodes';
grid = zeros(n,n);
d.myData.n = n;
blockedNode = [4 3 3 4 5 6 2 3 2 1 4;...
5 3 2 2 2 2 2 5 5 5 4];
for k = 1:size(blockedNode,2)
grid(blockedNode(1,k),blockedNode(2,k)) = 1;
end
Put in a one dimensional array
for k = 1:n
d.myData.grid(1,((k-1)*n+1):(k*n)) = grid(k,:);
end
d.n = length(d.myData.grid);
startNode = TransformGridCoordinates( 4, 1, n );
endNode = TransformGridCoordinates( 4, 6, n );
path = AStarSearch( startNode, endNode, d );
[y, x] = TransformGridCoordinates( path, n );
Plot2D( x, y, 'x', 'y', 'A* Search' );
n = n + 1;
set( gca, 'xlim', [0 n], 'ylim', [0 n], 'xtick', 0:n, 'ytick', 0:n )
hold on
[row, col] = TransformGridCoordinates( startNode, n-1 );
TextS(col,row-.15,' start')
plot(col,row,'*g')
[row, col] = TransformGridCoordinates( endNode, n-1 );
TextS(col,row-.15,' end')
plot(col,row,'*r')
for k = 1:size(blockedNode,2)
plot(blockedNode(2,k),blockedNode(1,k),'*k');
end