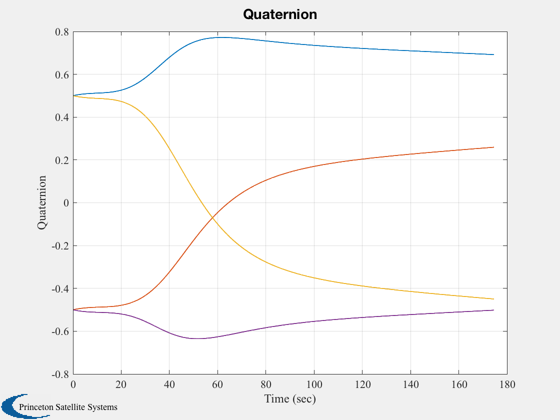
Simulate the fast reorientation system and demonstrate quaternion propagation
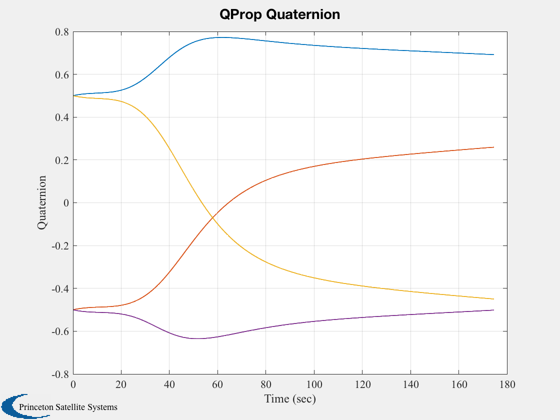
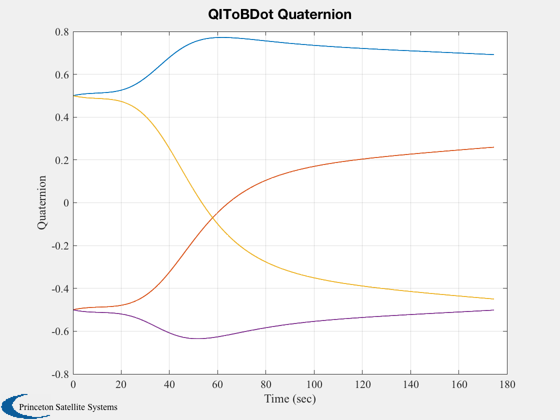
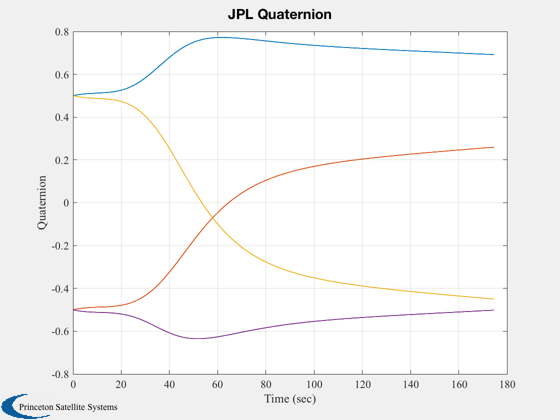
The routines are: QProp, QIToBDot, and the JPL propagation from the Wong reference.
------------------------------------------------------------------------------- References: Wong, E.C. and W.G. Breckenridge, "Inertial Attitude Determination for a Dual-Spin Planetary Spacecraft", AIAA Journal of Guidance Navigation, and Control Vol. 6, No. 6, Nov-Dec 1983, pp. 491-8. ------------------------------------------------------------------------- See also FRSTarg, FRSMPlan, FRSCGen, ShapeFlt, QIToBDot, QMult, QPose, QTForm, Plot2D, TimeGUI, RK4, Unit, QMultJPL, QProp, RIGModel -------------------------------------------------------------------------
Contents
- Global for the TimeGUI
- Simulation time step
- The spacecraft
- Design the shaping filter
- Initialize the state vector
- Set up the parameters
- Compute the quaternion that will rotate the spacecraft to the target
- The maximum allowable acceleration in rad/sec^2
- Gyro Data
- PD Controller
- Plotting variables
- Start the maneuver
- One step to initialize quaternion propagation
- FRS Command generator
- Spacecraft PD
- Add the FRS torque and pd torque
- Simulation
- Initialize the time display
- Plot the results
%-------------------------------------------------------------------------- % Copyright (c) 1997-1998 Princeton Satellite Systems, Inc. % All rights reserved. %-------------------------------------------------------------------------- % Since version 2. %--------------------------------------------------------------------------
Global for the TimeGUI
%------------------------ global simulationAction simulationAction = ' ';
Simulation time step
%---------------------
dT = 0.5;
n = 5;
nSim = 350;
The spacecraft
%---------------
cM = [ 0 0 0 ]';
mass = 1000.0;
inertia = [ 2300 0 0; 0 4500 0; 0 0 6600];
invInertia = inv(inertia);
torqueExt = zeros(3,1);
forceExt = zeros(3,1);
Design the shaping filter
%--------------------------
wn = [0.4835 0.9781 1.2437];
wnw = [0.5 0.5 0.5 ];
wD = [-40 -40 -40];
[af,bf,cf,df] = ShapeFlt( wn, wnw, wD, 0.2, dT );
xf = zeros(length(af),1);
Initialize the state vector
%---------------------------- x = [ 0.5 -0.5 0.5 -0.5 0.0 0.01 0.0 ]'; % x = [ 1 0 0 0 0.0 0.3 0.0 ]';
Set up the parameters
%----------------------
qRefTo0 = x(1:4) ;
xmodel = zeros(2,1);
xGyro = zeros(6,1);
utargetref = Unit([ 0.1 0.5 -0.4]');
usensor0 = [1;0;0];
Compute the quaternion that will rotate the spacecraft to the target
%---------------------------------------------------------------------
qRefTo1 = FRSTarg( qRefTo0, usensor0, utargetref );
The maximum allowable acceleration in rad/sec^2
%------------------------------------------------ maxaccel = 0.006; [qRefTo0i, axis0, maxaccel, nhalf, tbbscale, xmodel, umnvr] = ... FRSMPlan( qRefTo0, maxaccel, dT, inertia, qRefTo1 );
Gyro Data
%----------
uGyro = eye(3);
rateBiasGyro = [0; 0; 0];
rateRandomWalk1Sigma = [0; 0; 0];
betaGyro = [0; 0; 0];
noiseRandomWalk1Sigma = [0; 0; 0];
PD Controller
%--------------
rateGain = 2.0*0.7071*0.1*diag(inertia);
angleGain = 2.0*0.1^2*diag(inertia);
Plotting variables
%-------------------
anglePlot = zeros(3,nSim);
ratePlot = zeros(1,nSim);
errorPlot = zeros(1,nSim);
q0Plot = zeros(4,nSim);
tPlot = zeros(1,nSim);
uMnvrPlot = zeros(2,nSim);
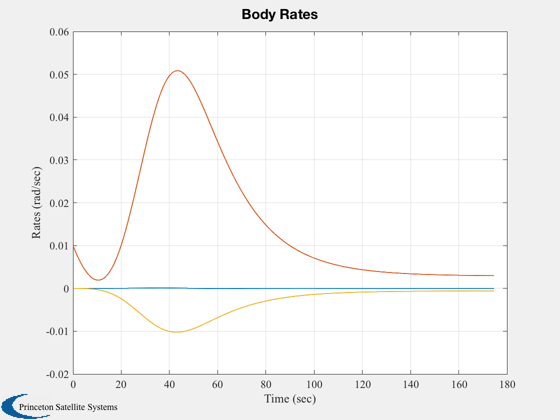
wPlot = zeros(3,nSim);
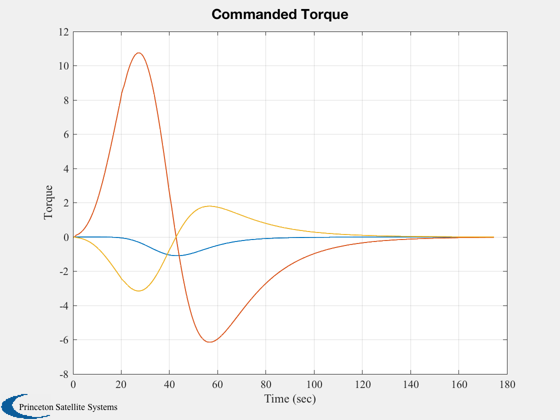
tCPLot = zeros(3,nSim);
gyroPlot = zeros(3,nSim);
qPSSPlot = zeros(4,nSim);
qJPLPlot = zeros(4,nSim);
qPSS2Plot = zeros(4,nSim);
Start the maneuver
%-------------------
t = 0;
dTSim = dT/n;
One step to initialize quaternion propagation
%----------------------------------------------
FRS Command generator
%---------------------- [qRefTo0, modelrate, tFRS, xmodel, umnvrf, umnvr, xf] = FRSCGen( axis0,... af, bf, cf, df, xmodel, tbbscale, qRefTo0i, umnvr, xf, dT, nhalf,... x(5:7), inertia, maxaccel, i );
Spacecraft PD
%--------------
angleError = QMult( QPose(x(1:4)), qRefTo0 );
rateError = x(5:7) - modelrate;
pd = - rateGain.*rateError - angleGain.*angleError(2:4);
Add the FRS torque and pd torque
%---------------------------------
torqueExt = tFRS + pd;
Simulation
%----------- for i=1:2 x = RK4( 'FRB', x, dTSim, t, inertia, invInertia, torqueExt ); xGyroLast = xGyro; xGyroDot = RIGModel(uGyro, x(5:7), rateBiasGyro, rateRandomWalk1Sigma,... noiseRandomWalk1Sigma, betaGyro); xGyro = xGyroDot*dTSim; t = t + dTSim; end; qPSS = x(1:4); qJPL = [-x(2:4);x(1)]; qPSS2 = x(1:4);
Initialize the time display
%---------------------------- tToGoMem.lastJD = 0; tToGoMem.lastStepsDone = 0; tToGoMem.kAve = 0; ratioRealTime = 0; [ ratioRealTime, tToGoMem ] = TimeGUI( nSim, 0, tToGoMem, 0, dTSim, 'QuatProp' ); for i = 1:nSim, % Display the status message %--------------------------- [ ratioRealTime, tToGoMem ] = TimeGUI( nSim, i, tToGoMem, ratioRealTime, dTSim ); % FRS Command generator %---------------------- [qRefTo0, modelrate, tFRS, xmodel, umnvrf, umnvr, xf] = FRSCGen( axis0,... af, bf, cf, df, xmodel, tbbscale, qRefTo0i, umnvr, xf, dT, nhalf,... x(5:7), inertia, maxaccel, i ); % Spacecraft PD %-------------- angleError = QMult( QPose(x(1:4)), qRefTo0 ); rateError = x(5:7) - modelrate; pd = - rateGain.*rateError - angleGain.*angleError(2:4); % Quantities for output of the simulation %---------------------------------------- uMnvrPlot(:,i) = [umnvrf;umnvr]; anglePlot(:,i) = angleError(2:4); ratePlot(i) = axis0'*x(5:7) ; tPlot(i) = t; q0Plot(:,i) = x(1:4); wPlot(:,i) = x(5:7); tCPlot(:,i) = tFRS; errorPlot(i) = acos( utargetref' * QTForm( qRefTo0, usensor0 ) ); qPSSPlot(:,i) = qPSS; qPSS2Plot(:,i) = qPSS2; qJPLPlot(:,i) = [qJPL(4); -qJPL(1:3)]; gyroPlot(:,i) = xGyro(1:3); % Add the FRS torque and pd torque %--------------------------------- torqueExt = tFRS + pd; % Simulation %----------- for k = 1:n qPSS = QProp( qPSS, [xGyro(1:3) xGyroLast(1:3)], 4 ); qPSS2 = Unit(qPSS2+QIToBDot( qPSS2, xGyroDot(1:3), dTSim)*dTSim); thetaLastJPL = [xGyroLast(1:3); 0]; thetaJPL = [xGyro(1:3); 0]; thetaJPLSq = QMultJPL(thetaJPL)*thetaJPL; thetaJPLCu = QMultJPL(thetaJPLSq)*thetaJPL; thetaJPLQu = QMultJPL(thetaJPLCu)*thetaJPL; qJPLFact = [0;0;0;1] + 0.5*thetaJPL + 0.125*thetaJPLSq + (thetaJPLCu ... + QMultJPL(thetaLastJPL)*thetaJPL - QMultJPL(thetaJPL)*thetaLastJPL)/48 ... + thetaJPLQu/384; qJPL = QMultJPL(qJPLFact)*qJPL; x = RK4( 'FRB', x, dTSim, t, inertia, invInertia, torqueExt ); xGyroLast = xGyro; xGyroDot = RIGModel(uGyro, x(5:7), rateBiasGyro, rateRandomWalk1Sigma,... noiseRandomWalk1Sigma, betaGyro); xGyro = xGyroDot*dTSim; t = t + dTSim; end % Time control %------------- switch simulationAction case 'pause' pause simulationAction = ' '; case 'stop' return; case 'plot' break; end end j = 1:i; tPlot = tPlot(j);
Plot the results
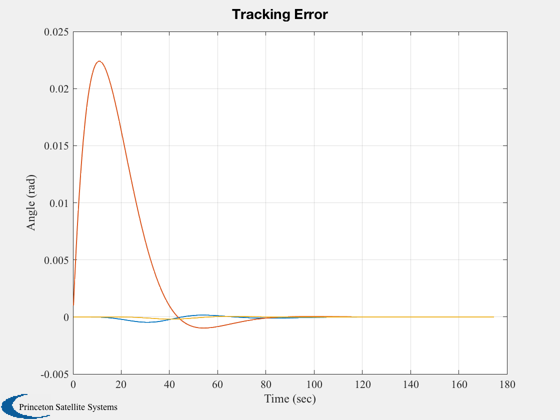
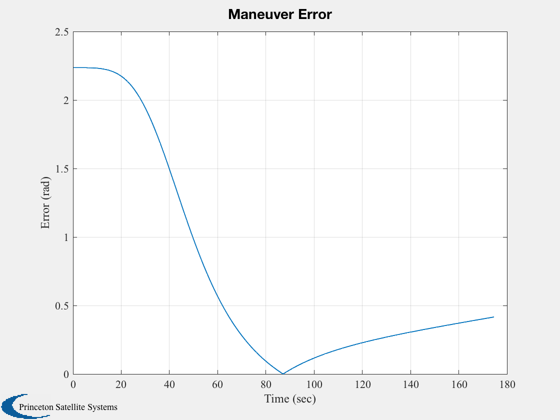
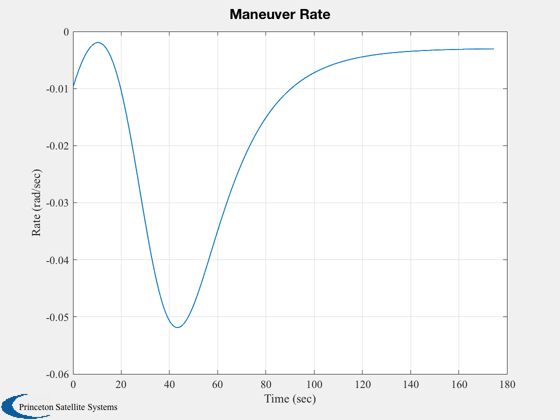
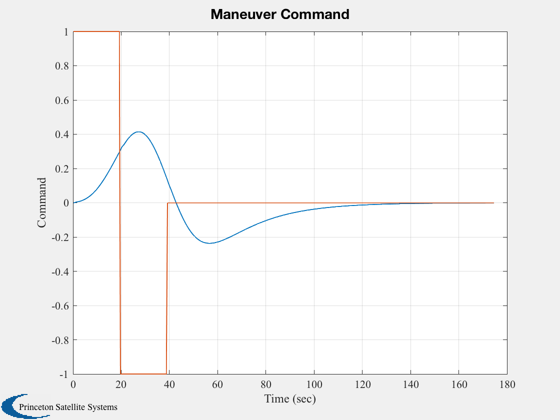
%----------------- Plot2D( tPlot, q0Plot(:,j), 'Time (sec)', 'Quaternion', 'Quaternion' ) Plot2D( tPlot, qPSSPlot(:,j), 'Time (sec)', 'Quaternion', 'QProp Quaternion' ) Plot2D( tPlot, qPSS2Plot(:,j), 'Time (sec)', 'Quaternion', 'QIToBDot Quaternion' ) Plot2D( tPlot, qJPLPlot(:,j), 'Time (sec)', 'Quaternion', 'JPL Quaternion' ) Plot2D( tPlot, anglePlot(:,j), 'Time (sec)', 'Angle (rad)', 'Tracking Error' ) Plot2D( tPlot, errorPlot(j), 'Time (sec)', 'Error (rad)', 'Maneuver Error' ) Plot2D( tPlot, ratePlot(j), 'Time (sec)', 'Rate (rad/sec)', 'Maneuver Rate' ) Plot2D( tPlot, uMnvrPlot(:,j), 'Time (sec)', 'Command', 'Maneuver Command' ) Plot2D( tPlot, wPlot(:,j), 'Time (sec)', 'Rates (rad/sec)', 'Body Rates' ) Plot2D( tPlot, tCPlot(:,j), 'Time (sec)', 'Torque', 'Commanded Torque' ) TimeGUI('close'); Figui; %--------------------------------------