Linear orbit simulation. This compares nonlinear with linear.
In addition it computes the analytical solution for the linearized equations.
------------------------------------------------------------------------
See also C2DZOH, Plot2D, RK4, CylOrb2Cart, RelativeOrbitState, LinOrb,
El2RV, Period
------------------------------------------------------------------------
Contents
sMA = 7000;
[r1,v1] = El2RV( [sMA 0 0 0 0 0 ]);
p = Period( sMA );
n = 2*pi/p;
dT = 50;
nSim = 4*p/dT + 1;
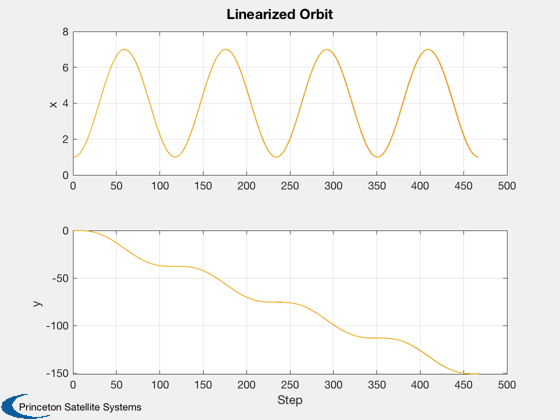
The linearized orbit
[a,b,c,d] = LinOrb([],n);
[a,b] = C2DZOH( a, b, dT );
The linearized orbit state
x0 = [1;0;0;0;0;0];
Write the intial state in cylindrical coordinates
x1 = [7000;0;0;0;n;0];
x2 = x1 + x0;
Convert to cartesian
x1 = CylOrb2Cart( x1 );
x2 = CylOrb2Cart( x2 );
t = 0;
x = x0;
xPlot = [];
for k = 1:nSim
s = sin(n*t);
c = cos(n*t);
xA = 2*x0(4)*s/n - (2*x0(5)/n + 3*x0(1))*c + (2*x0(5)/n + 4*x0(1));
yA = 2*x0(4)*c/n + (4*x0(5)/n + 6*x0(1))*s + (x0(2) - 2*x0(4)/2) - (3*x0(5) + 6*n*x0(1))*t;
d = RelativeOrbitState( x1, x2 );
xPlot(:,k) = [x(1:2);xA;yA;d(1);d(2)];
x = a*x;
x1 = RK4( 'FOrb', x1, dT, t, 'car' );
x2 = RK4( 'FOrb', x2, dT, t, 'car' );
t = t + dT;
end
Plot2D(1:nSim,xPlot(1:6,:),'Step',['x ';'y ';],'Linearized Orbit','lin',['[1 3 5]';'[2 4 6]'])