Attitude determination using a Kalman Filter
------------------------------------------------------------------------
See also KFSAAD, Delay, Quant, RaDec2U, DupVect, UE, ADGen
------------------------------------------------------------------------
Contents
nsamples = 600;
degToRad = pi/180;
rPMToRPS = 2*pi/60;
cant1 = 94*degToRad;
cant2 = 86*degToRad;
dihedral1 = 0*degToRad;
dihedral2 = 45*degToRad;
ssbias = 0.0;
ssnoise = 0.0*degToRad;
ssquant = 0.000001*degToRad;
erbias = 0.0;
cw1bias = 0.0;
cw2bias = 0.0;
da1bias = 0.0;
da2bias = 0.0;
cant1bias = 0.0;
cant2bias = 0.0;
Sun vector is constant in this demo
c10 = cos(10*degToRad);
s10 = sin(10*degToRad);
usun = DupVect([c10;0;s10],nsamples);
qtype = 'round';
onesigma = 0.0;
sunbias = 0.0;
spinrate = 10*rPMToRPS;
quant = 1.e-6;
delay = 0;
The orbital elements
el(1) = (42167 + 6800)/2;
el(2) = 7 * pi/180;
el(3) = 0;
el(4) = 0;
el(5) = 0.7;
The true attitude
ra = 1.5;
dec = -0.4;
uspin = RaDec2U(ra,dec);
Get the horizon sensor data and sun angles
cantAngle = [cant1;cant2];
cantBias = [cant1bias;cant2bias];
dihedralBias = [dihedral1;dihedral2];
mA = linspace(pi/2,3*pi/2,nsamples);
[tLE,tTE,sa,unadir,eradius] = ADGen( el, usun, uspin, spinrate, mA, [delay;delay],...
[quant;quant], [qtype;qtype], [onesigma;onesigma],...
cantAngle, cantBias, dihedralBias, ssquant,...
'round', ssnoise, ssbias, erbias );
Reformat the data
tte1 = tTE(1,:);
tte2 = tTE(2,:);
tle1 = tLE(1,:);
tle2 = tLE(2,:);
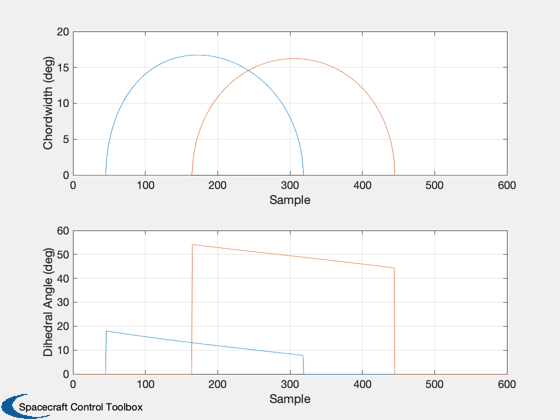
Extract the data with chordwidths above a threshold
chordwidth1 = spinrate*(tte1-tle1);
chordwidth2 = spinrate*(tte2-tle2);
kr = find(chordwidth1 > 6*degToRad | chordwidth2 > 6*degToRad);
us = usun(:,kr);
ue = unadir(:,kr);
er = eradius(kr);
cw1 = chordwidth1(kr) + cw1bias;
cw2 = chordwidth2(kr) + cw2bias;
da1 = 0.5*spinrate*(tte1(kr)+tle1(kr))-dihedral1 + da1bias;
da2 = 0.5*spinrate*(tte2(kr)+tle2(kr))-dihedral2 + da2bias;
sb = sa(kr);
The state vector
H = zeros(1,10);
Initial guess
x = [1.5 -0.3 0.01 0 0 0 0 0 0 0]';
ff = 0.1;
nits = 1;
Rsb = 0.01;
Rcw = 0.1;
Rda = 0.1;
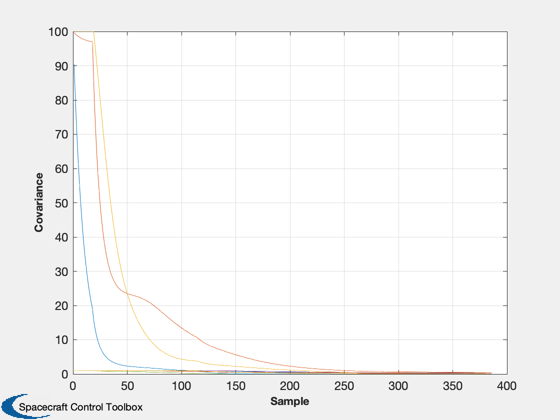
P = diag([100,100,100,1,1,1,1,1,1,1]);
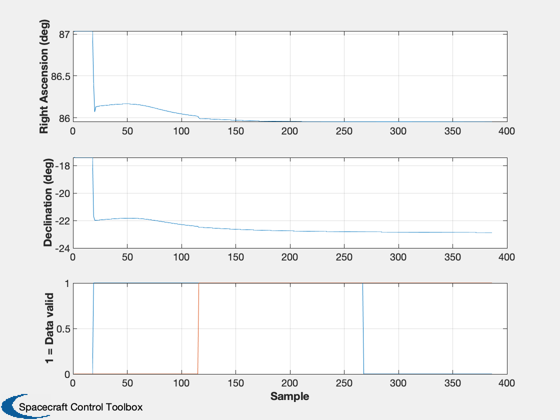
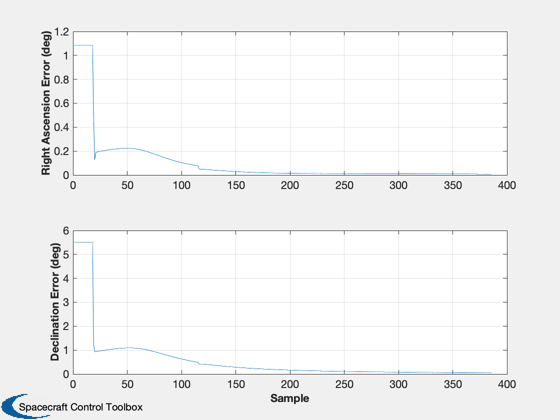
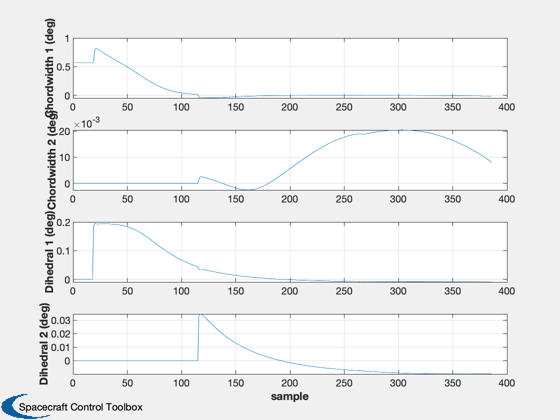
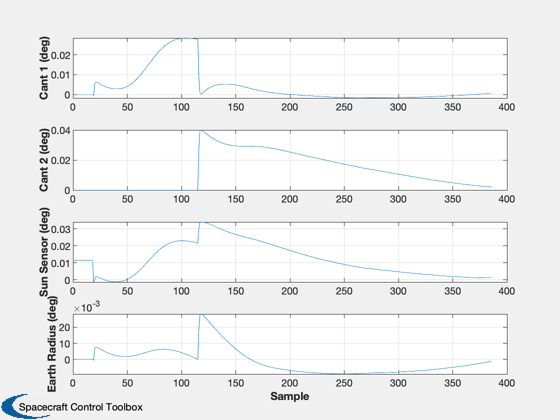
Call the Kalman filter. It will process all measurements and plot the results
KFSAAD(x,P,Rcw,Rda,Rsb,cw1,cw2,da1,da2,sb,ue,us,er,cant1,cant2,ff,[],[ra,dec])