Demonstrate two body dynamics using the two body dynamics model.
See TBModel and FTB.
------------------------------------------------------------------------
See also QTForm, NPlot, Plot2D, RK4, TBModel
------------------------------------------------------------------------
Contents
r0 = [1;1;1];
r1 = [1;1;1];
lam1 = [1;1;1];
iner0 = 1000*[1.0, 0.1, 0.1; 0.1, 2.0, 0.1; 0.1, 0.1, 3.0];
iner1 = 100*[1.0, 0.1, 0.1; 0.1, 2.0, 0.1; 0.1, 0.1, 3.0];
m0 = 1000;
m1 = 1;
Initial State
dOF = 1;
nDOF = length(dOF);
nStates = 11+length(dOF);
q = [1;0;0;0];
q0To1 = [1;0;0;0];
w0 = [0.01;0.01;0.01];
w1 = 0.01*ones(nDOF,1);
tExt = [0;0;0];
tInt = 1.e-5*ones(nDOF,1);
torque = [tExt;tInt];
force = zeros(6,1);
x = [q;q0To1;w0;w1];
dTSim = 0.5;
nSim = 100;
nPMax = 10;
nPlot = nSim/nPMax;
xPlot = zeros(nStates,nPlot);
tPlot = zeros( 1,nPlot);
hPlot = zeros( 4,nPlot);
Run the simulation
kP = 0;
nP = 0;
t = 0;
for k = 1:nSim
q0To1 = x(5:8);
w0 = x(9:11);
w1 = x(12:nStates);
[wdot,h,iner] = TBModel( w0, w1, q0To1, r0, r1, lam1, iner0, iner1, m0, m1, torque, force, dOF );
hECI = QTForm( x(1:4), h );
if( nP == 0 )
kP = kP + 1;
xPlot(:,kP) = x;
hPlot(:,kP) = [hECI;sqrt(h'*h)];
tPlot(kP) = t;
nP = nPMax - 1;
else
nP = nP - 1;
end
x = RK4( @FTB, x, dTSim, t, r0, r1, lam1, iner0, iner1, m0, m1, torque, force, dOF );
t = t + dTSim;
end
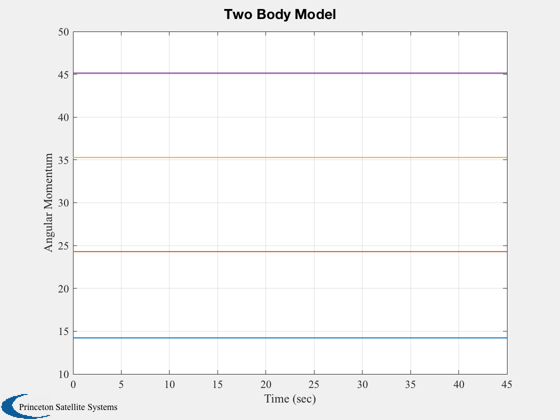
Plot2D(tPlot,hPlot,'Time (sec)','Angular Momentum','Two Body Model')
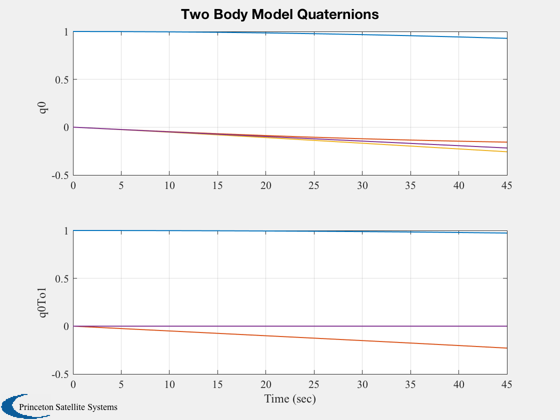
Plot2D(tPlot,xPlot(1:8,:),'Time (sec)',{'q0','q0To1'},'Two Body Model Quaternions','lin',...
{'[1:4]','[5:8]'})
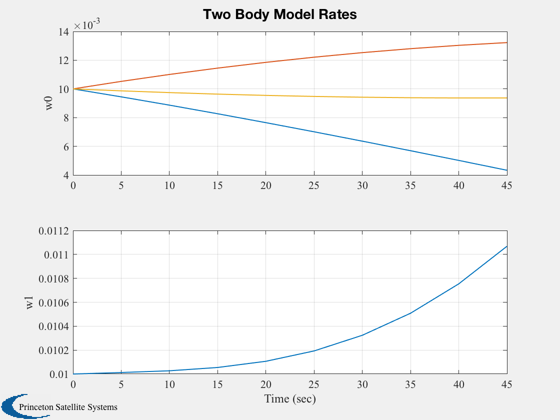
Plot2D(tPlot,xPlot(9:end,:),'Time (sec)',{'w0','w1'},'Two Body Model Rates','lin',...
{'[1:3]','[4]'})