Contents
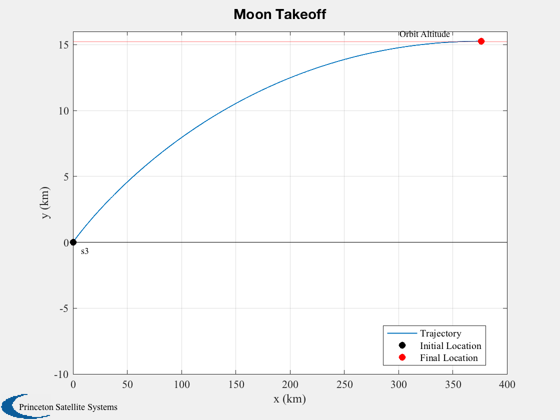
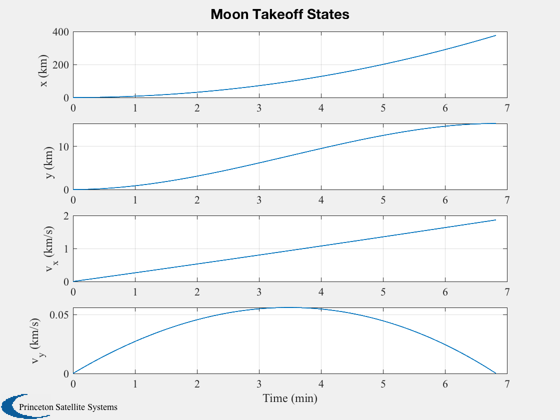
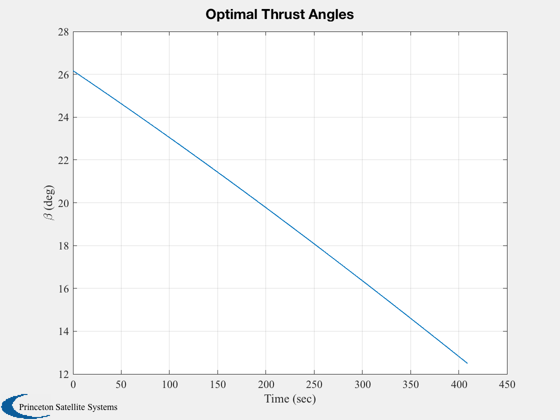
Takeoff demo using bilinear tangent thrust programming.
Setup
body = 'Moon';
switch body
case 'Mars'
mu = Constant('mu mars');
rMars = Constant('equatorial radius mars');
u = sqrt(mu/rMars);
g = mu/rMars^2;
h = 200;
case 'Moon'
u = 1.8654;
g = 1.6154e-3;
h = 15.240;
end
n = 2000;
a = 3*g;
TolX = 1e-7; TolFun = 1e-11; MaxFunEvals = 2500;
Options = optimset('TolX',TolX,'TolFun',TolFun,'MaxFunEvals',MaxFunEvals);
[beta, t] = BilinearTangentLaw( u, g, a, h, n, Options );
BilinearTangentLaw( u, g, a, h, n, Options );
dT = t(2) - t(1);
xP = zeros(4,n);
x = [0;0;0;0];
Simulate
for k = 1:n
xP(:,k) = x;
x = RK4('RHSPlanetTakeoff',x,dT,t,a,g,beta(k));
end
Plot
[t, tL] = TimeLabl(t);
s1 = sprintf('%s Takeoff',body);
s2 = sprintf('%s Takeoff States',body);
s3 = sprintf('%s Surface',body);
Plot2D(xP(1,:),xP(2,:),'x (km)','y (km)',s1);
hold on
plot(xP(1,1),xP(2,1),'ko','MarkerFaceColor','k')
plot(xP(1,end),xP(2,end),'ro','MarkerFaceColor','r')
xLim = get(gca,'xlim');
set(gca,'yLim',[-10 floor(1.1*h)])
line(xLim,[0,0],'color','black')
text(xP(1,1)+0.02*xP(1,end),-0.04*h,'s3')
line(xLim,[h;h],'color','red')
text(0.8*xP(1,end),1.04*h,'Orbit Altitude')
legend('Trajectory','Initial Location','Final Location','Location','Best')
Plot2D(t,xP,tL,{'x (km)','y (km)','v_x (km/s)', 'v_y (km/s)'},s2);