Attitude control of a sail using ballast masses in-plane.
Demonstrates control of a single axis using a simple PID controller.
This uses a fixed-rate dynamics model that is suitable for masses that
are controlled by stepper motors.
Demonstrates:
PlateWithMasses
PIDMIMO
FMovingBody and FCoreAndMoving
TorqueToCM
CMToMassPositions
Since version 7.
------------------------------------------------------------------------
See also AC, PIDMIMO, QTForm, QZero, Plot2D, Cross, RK4,
CMToMassPositions, TorqueToCM, FCoreAndMoving, FMovingBody
------------------------------------------------------------------------
Contents
pitchStep = 0.01;
yawStep = 0.01;
clear SailDisturbance
First, create suitable CAD model
g = load('PlateWithMasses');
Second, design controller
Control parameters - use PIDMIMO to design control loops
xN = zeros(6,1);
iner = diag([1 1 1]);
zeta = 2;
wn = 0.001;
tauInt = 5000;
omegaR = 5*wn;
sType = 'z';
dT = 30;
[aC, bC, cC, dC] = PIDMIMO( iner, zeta*ones(1,3), wn*ones(1,3), tauInt*ones(1,3), ...
omegaR*ones(1,3), dT, sType );
uControl = [0 1 0; 0 0 1]';
dOffset = zeros(3,3);
mControl = [g.body(1).mass.mass g.body(2).mass.mass g.body(3).mass.mass];
Third, set up an attitude maneuver to simulate
xCore = [zeros(6,1);QZero;zeros(3,1)];
xMass = [zeros(6,1);QZero;zeros(3,1)];
x = [xCore; xMass; xMass];
iR1 = 2+13;
iR2 = 3+26;
iV1 = 5+13;
iV2 = 6+26;
angCommand = [0;pitchStep;yawStep];
f = struct;
f.total = [-2*1367/3e8*100^2;0;0];
tq = struct;
tq.total = [0;0;0];
Cp = [0;0;0];
d.g = g;
d.nBody = 3;
maxRate = 1;
Fourth, simulate maneuver
nSim = 60;
xPlot = zeros(size(x,1),nSim);
tPlot = zeros(1,nSim);
aEPlot = zeros(3,nSim);
TcPlot = zeros(3,nSim);
TaPlot = zeros(3,nSim);
for k = 1:nSim
angleError = [0;0;0];
u = QTForm( x(7:10), [1;0;0] );
angleError(3) = u(2) - angCommand(3);
angleError(2) = -u(3) - angCommand(2);
yN = cC*xN + dC*angleError;
xN = aC*xN + bC*angleError;
Tcommand = -g.mass.inertia*yN;
cM = TorqueToCM( Tcommand, f.total, Cp );
rhoCommand = CMToMassPositions( cM, mControl, dOffset, uControl );
rhoActual = [x(iR1); x(iR2)];
deltaRho = rhoCommand - rhoActual;
rhoDot = sign(deltaRho).*min( abs(deltaRho)/dT, maxRate*[1;1] );
xRates = x;
xRates(iV1) = rhoDot(1);
xRates(iV2) = rhoDot(2);
xNew = FMovingBody( 'init', x, xRates, tq, struct('g', g) );
g.body(2).rHinge = [0;rhoActual(1);0];
g.body(3).rHinge = [0;0;rhoActual(2)];
cMActual = (mControl(2)*g.body(2).rHinge + mControl(3)*g.body(3).rHinge)/g.mass.mass;
tq.total = Cross( Cp - cMActual, f.total );
d.force = f;
d.torque = tq;
xPlot(:,k) = x;
tPlot(:,k) = (k-1)*dT;
aEPlot(:,k) = angleError;
TcPlot(:,k) = Tcommand;
TaPlot(:,k) = tq.total;
x = RK4( @FCoreAndMoving, xNew, dT, 0, '', d );
end
Plot
h = [];
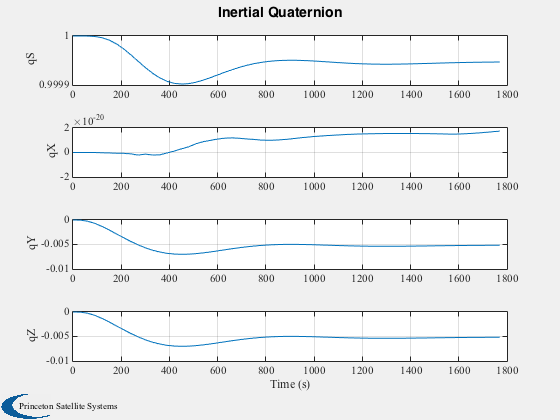
h(1) = Plot2D( tPlot, xPlot(7:10,:), 'Time (s)', {'qS','qX','qY','qZ'},'Inertial Quaternion' );
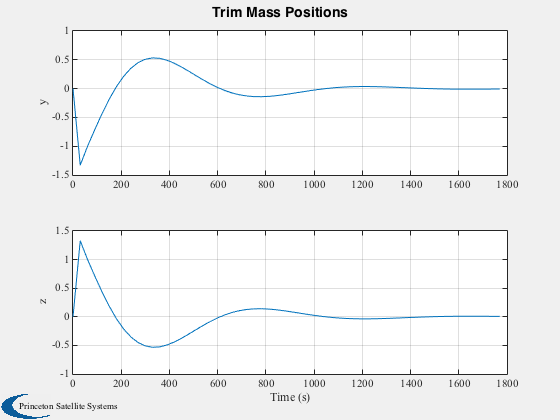
h(2) = Plot2D( tPlot, xPlot([iR1 iR2],:), 'Time (s)', {'y','z'},'Trim Mass Positions' );
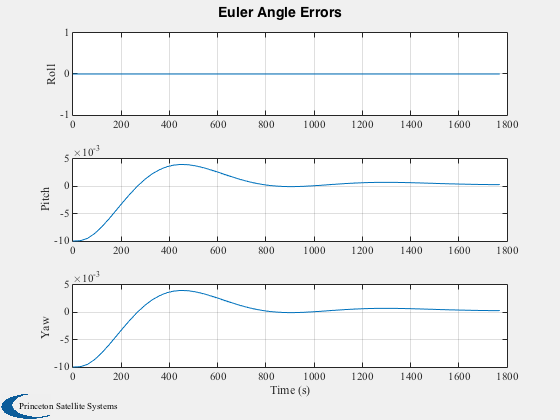
h(3) = Plot2D( tPlot, aEPlot, 'Time (s)', {'Roll','Pitch','Yaw'},'Euler Angle Errors' );
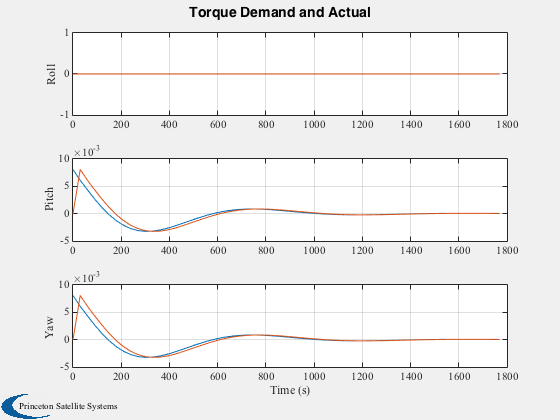
Plot2D( tPlot, [TcPlot;TaPlot], 'Time (s)', {'Roll','Pitch','Yaw'},'Torque Demand and Actual',...
'lin',{[1 4],[2 5],[3 6]});
if 0
figure(h(3));
print -depsc2 AngleErrorsM1Axis
figure(h(2));
print -depsc2 MassPositionsM1Axis
figure(h(1));
print -depsc2 QInertialM1Axis
end