Compute sail force over incidence angle.
Uses SteeringAnglesToQ to compute the quaternion for the model for the
given set of incidence angles, then uses the full disturbance model in
SaiDisturbance to compute the force and torque. The true cone angle can
then be post-computed from the force vector.
Since version 9.
------------------------------------------------------------------------
See also DrawSCPlanPlugIn, Cone, Constant, Plot2D, Unit, JD2000, El2RV,
QSail, SteeringAnglesToQ, UToConeClock, DisturbanceStruct,
EnvironmentStruct, SailDisturbance, SailEnvironment
------------------------------------------------------------------------
Contents
clear SailDisturbance
Load the sail models
g = load('BillowedSquareSail.mat');
DrawSCPlanPlugIn('initialize',g);
Create the profile
Single orbit location at 1 AU
aU = Constant('au');
mu = Constant('mu sun');
p = [];
[p.r, p.v] = El2RV([aU,0,0,0,0,0], [], mu );
p.jD = JD2000*ones(1,100);
Heliocentric sun vector: just -rHat
s = -Unit(p.r);
Quaternion for range of incidence angles
incidence = linspace(0,pi/2);
clock = 0;
qSail = QSail( s, [], p.v, -1 );
for k = 1:length(incidence)
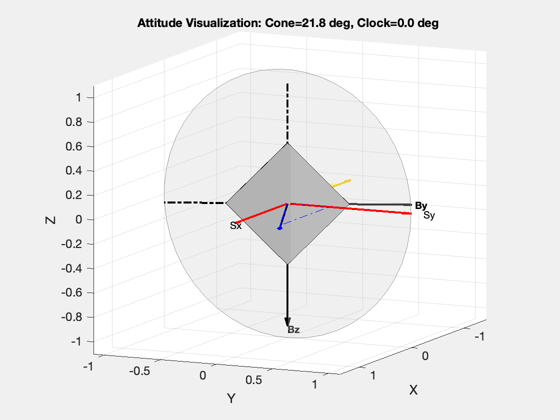
p.q(:,k) = SteeringAnglesToQ( incidence(k), clock, qSail, [], [], -1 );
end
SteeringAnglesToQ( incidence(25), clock, qSail, [], [], -1 )
incidence =
0.3808
clock =
0
These angles should match:
cone2 =
0.3808
clock2 =
3.059e-16
ans =
6.0126e-17
0.18925
-0.98193
1.1588e-17
Create the data structure
Get default structure for disturbances and environment
d = DisturbanceStruct;
d = EnvironmentStruct( d );
Turn on aerodynamics
d.aeroOn = 0.0;
Turn off albedo
d.albedoOn = 0.0;
Turn on solar
d.solarOn = 1.0;
Turn off magnetic torques
d.magOn = 0.0;
Turn off (planetary) radiation
d.radOn = 0.0;
Turn off gravity gradient
d.ggOn = 0.0;
Orbiting the sun
d.planet = 'Sun';
The inputs are ( cad model, profile structure, function control structure )
e = SailEnvironment( d.planet, p, d );
[f,t] = SailDisturbance( g, p, e, d );
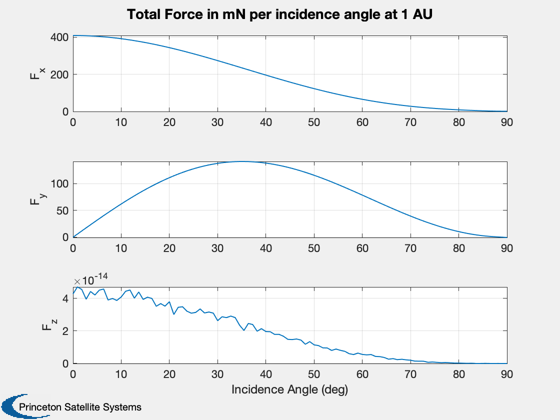
Plot2D(incidence*180/pi,f.total*1e3,'Incidence Angle (deg)',{'F_x','F_y','F_z'},...
'Total Force in mN per incidence angle at 1 AU')
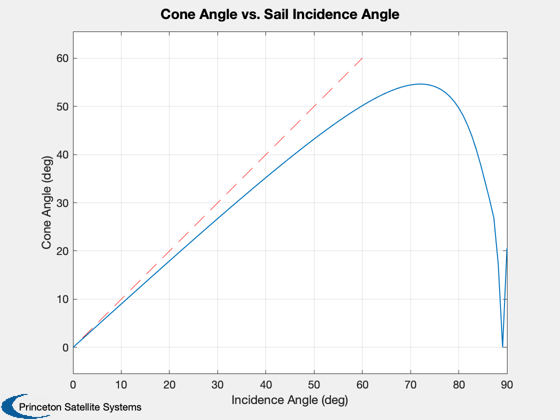
fHat = Unit(f.total);
[cone,clock] = UToConeClock( fHat, qSail );
Plot2D(incidence*180/pi,cone*180/pi,'Incidence Angle (deg)','Cone Angle (deg)',...
'Cone Angle vs. Sail Incidence Angle')
axis equal
hold on
plot(1:60,1:60,'r--')