Sail attitude evolution under disturbances. No orbit dynamics.
Combines a CAD model with the disturbance model and a simple RHS. The sail
starts out in a sun-pointing attitude with an offset and nonzero body rates.
Functions demonstrated:
FlatPlate.m / FlatSail.mat, the CAD model
SailDisturbance.m, the full disturbance model
SailEnvironment.m, the environment model
FRB.m, rigid body dynamics integrated with RK4
Since version 7.
------------------------------------------------------------------------
See also DrawSCPlanPlugIn, AU2Q, QMult, Constant, Plot2D, RK4, Unit,
JD2000, RARP2A, RARP2E, El2RV, CEcl2Eq, QSail, DisturbanceStruct,
EnvironmentStruct, ProfileStruct, SailDisturbance, SailEnvironment
------------------------------------------------------------------------
Contents
Load and view the sail model
g = load('FlatSail.mat');
DrawSCPlanPlugIn('initialize',g);
view(3); axis equal; axis square;
clear SailDisturbance
Hold at a single point in interplanetary orbit
aU = Constant('au');
mu = Constant('mu sun');
rP = 0.25*aU;
rA = aU;
a = RARP2A( rA, rP );
e = RARP2E( rA, rP );
Profile is stored in p for disturbance function
p = ProfileStruct;
[p.r, p.v] = El2RV([a,0,0,0,e,0], [], mu );
p.jD = JD2000;
Vectors must be in ECI so transform from the ecliptic
c = CEcl2Eq;
p.r = c*p.r;
p.v = c*p.v;
Quaternion (sun pointing with an offset)
q0 = QMult(QSail( -Unit(p.r), p.r, p.v ), AU2Q(0.05,[0;1;0]) );
Initial body rate (rad/s)
w0 = [0.001;0.0005;-0.001]/100;
Create the data structure
d = DisturbanceStruct;
d = EnvironmentStruct( d );
Turn off unwanted disturbances
d.aeroOn = 0.0;
d.albedoOn = 0.0;
d.magOn = 0.0;
d.radOn = 0.0;
d.ggOn = 0.0;
Turn on solar
d.solarOn = 1.0;
Orbiting the sun
d.planet = 'Sun';
Simulation loop
t = 0;
dT = 100;
x = [q0;w0];
Store mass properties for speed
inr = g.mass.inertia;
invInr = inv(inr);
Set up plotting arrays
nPts = 100;
xPlot = zeros(7,nPts+1);
tPlot = zeros(1,nPts+1);
fPlot = zeros(3,nPts);
tqPlot = zeros(3,nPts);
xPlot(:,1) = x;
for k = 1:nPts
p.q = x(1:4);
e = SailEnvironment( d.planet, p, d );
[fS,tS] = SailDisturbance( g, p, e, d );
fPlot(:,k) = fS.total;
tqPlot(:,k) = tS.total;
x = RK4( 'FRB', x, dT, t, inr, invInr, tS.total );
t = t+dT;
xPlot(:,k+1) = x;
tPlot(:,k+1) = t;
end
Create plots
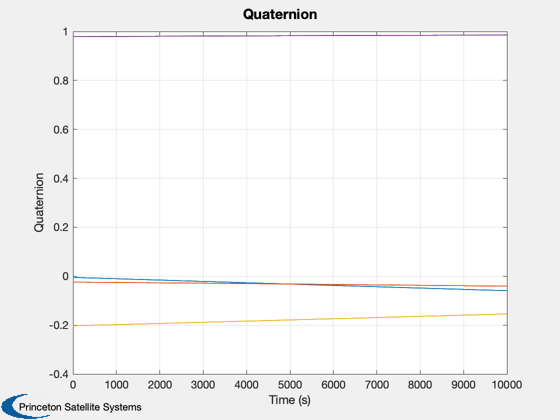
Plot2D(tPlot,xPlot(1:4,:),'Time (s)','Quaternion');
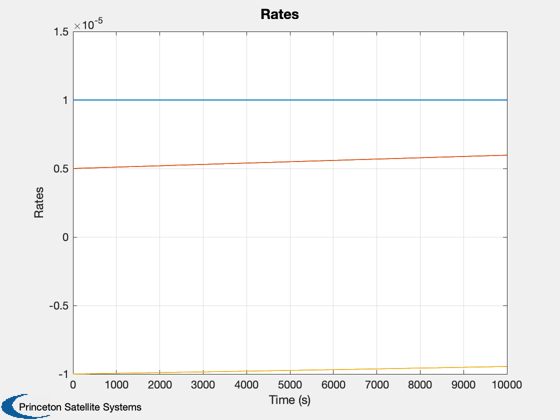
Plot2D(tPlot,xPlot(5:7,:),'Time (s)','Rates');
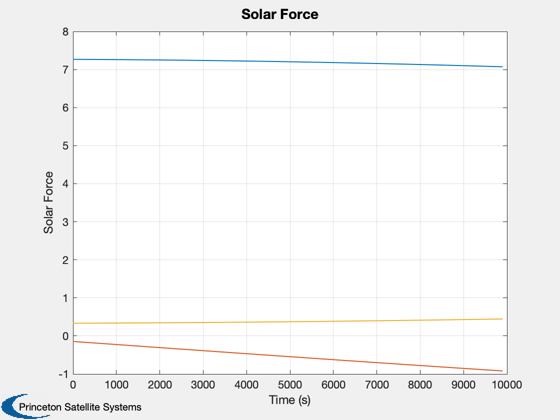
Plot2D(tPlot(1:end-1),fPlot,'Time (s)','Solar Force');
Plot2D(tPlot(1:end-1),tqPlot,'Time (s)','Solar Torque');