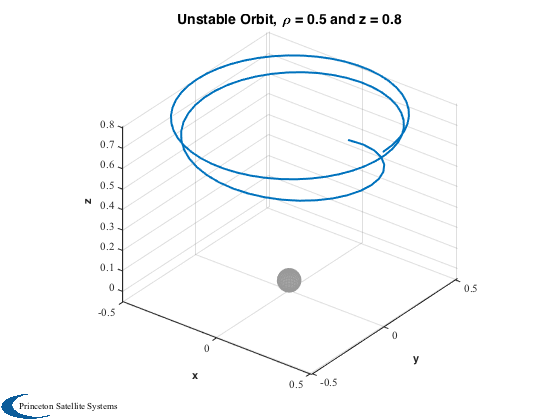
Simulate a non-Keplerian sail orbit in a cylindrical sun-centered frame.
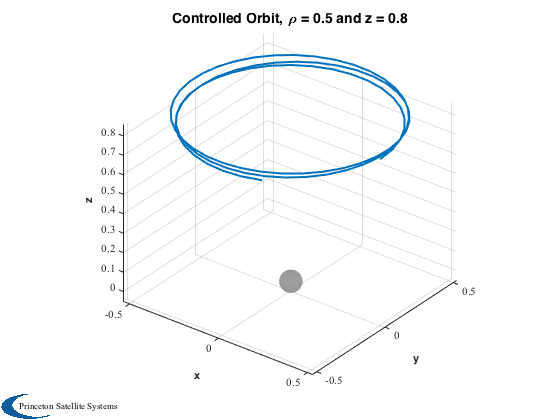
The sail enables a displaced orbit above the ecliptic plane.
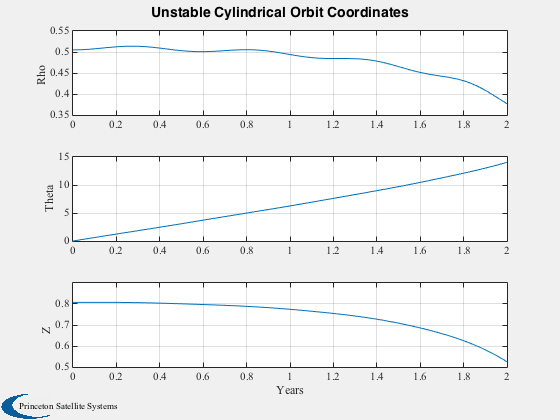
Initially the sail elevation angle is fixed, resulting in an unstable
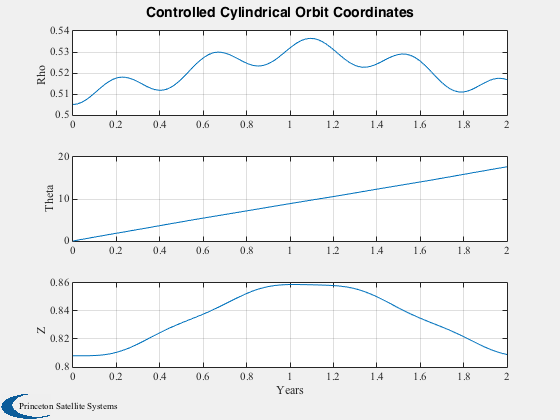
orbit. Then, the sail pitch angle is fixed instead, resulting in a stable
oscillation.
Since version 7.
------------------------------------------------------------------------
Reference: Colin R. McInnes, "Solar Sailing: Technology, Dynamics and Mission
Applications", Springer Praxis, London, 1999, Fig. 5.7 p. 186 and
Fig. 5.9 on p. 191.
------------------------------------------------------------------------
See also Constant, InformDlg, Plot2D, Plot3D, NonKeplerianSun,
FRotatingSun
------------------------------------------------------------------------
Contents
rho0 = 0.5;
z0 = 0.8;
r0 = [rho0;0;z0];
dR = 0.01*r0;
w0 = 1;
mu = Constant('mu sun');
au = Constant('au');
omega = sqrt(mu/au^3);
[pitch0,beta] = NonKeplerianSun( rho0*au, z0*au, omega )
elevation0 = atan( z0/rho0 ) + pitch0;
opts = odeset('abstol',1e-12,'reltol',1e-8);
pitch0 =
0.4587
beta =
1.0601
(fixed sail attitude in rotating frame)
nOrb = 2;
t = linspace(0,nOrb*2*pi,100);
hDlg = InformDlg( 'Integrating...', 'NonKeplerSunSim' );
[tOut,z] = ode113( @FRotatingSun, t, [r0+dR;0;w0;0], opts, elevation0, beta, 2 );
close(hDlg);
years = tOut'/2/pi;
Plot2D(years,z(:,1:3)','Years',{'Rho','Theta','Z'},'Unstable Cylindrical Orbit Coordinates');
theta = z(:,2)';
c = cos(theta);
s = sin(theta);
rX = z(:,1)'.*c;
rY = z(:,1)'.*s;
Plot3D([rX;rY;z(:,3)'],[],[],[],'Unstable Orbit, \rho = 0.5 and z = 0.8',0.05)
axis tight
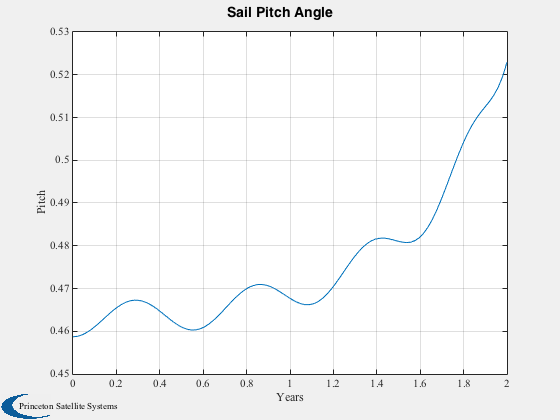
pitch = elevation0 - atan( z(:,3)' ./ z(:,1)' );
Plot2D(years,pitch,'Years','Pitch','Sail Pitch Angle');
(changing sail attitude)
nOrb = 3;
t = linspace(0,nOrb*2*pi,100);
[tOut,z] = ode113( @FRotatingSun, t, [r0+dR;0;w0;0], opts, pitch0, beta, 1 );
Plot2D(years,z(:,1:3)','Years',{'Rho','Theta','Z'},'Controlled Cylindrical Orbit Coordinates');
theta = z(:,2)';
c = cos(theta);
s = sin(theta);
rX = z(:,1)'.*c;
rY = z(:,1)'.*s;
Plot3D([rX;rY;z(:,3)'],[],[],[],'Controlled Orbit, \rho = 0.5 and z = 0.8',0.05)
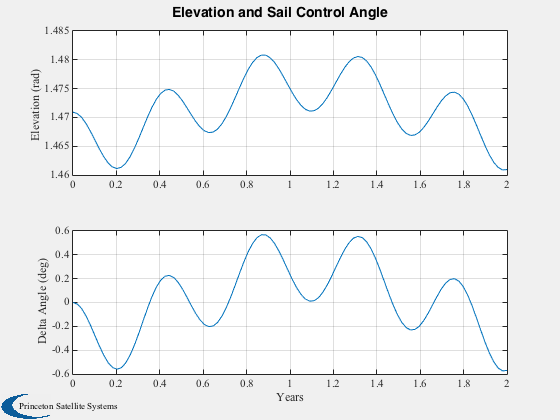
elevation = pitch0 + atan( z(:,3)' ./ z(:,1)' );
Plot2D(years,[elevation;(elevation-elevation0)*180/pi],'Years',...
{'Elevation (rad)','Delta Angle (deg)'},'Elevation and Sail Control Angle');