Demonstrate sail attitude plots that do not require a CAD model.
Since version 7. ------------------------------------------------------------------------ See also VisualizeSailAttitude, DrawSailAngles, DrawSailFrames, Cone, Constant, Unit, El2RV, QSail, SteeringAnglesToQ ------------------------------------------------------------------------
Contents
%------------------------------------------------------------------------------- % Copyright (c) 2009 Princeton Satellite Systems, Inc. %-------------------------------------------------------------------------------
Heliocentric orbit
Set an orbit with nontrivial inclination and eccentricity. Elements are [$a$ 



 ]
]
el = [Constant('au') 0.2 0 0 0.1 0.3];
Get the Cartesian position and velocity
[r,v] = El2RV(el);
The sun vector is just -rHat
s = -Unit(r);
Select a reference frame for measuring the angles
qRef = QSail( s, r, v, -1 );
Select random cone and clock angles
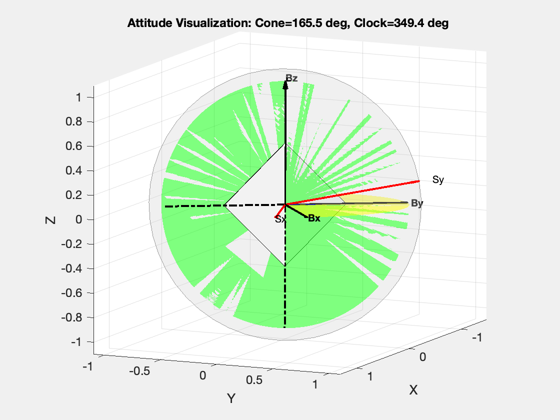
Specify a cone angle in the neighborhood of 30 degrees and a clock angle anywhere from 0 to 360 degrees. Use the cone and clock as steering angles for the sail normal.
cone = pi/6 + randn*0.2; clock = rand*2*pi; q = SteeringAnglesToQ( cone, clock, qRef );
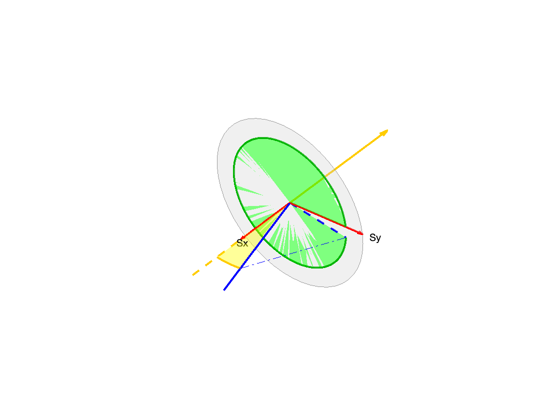
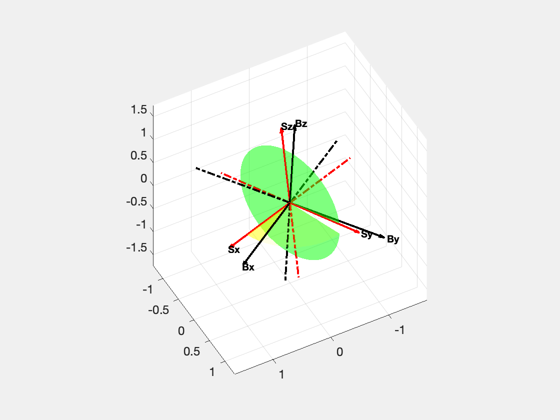
Plot the sail attitude in 3D
VisualizeSailAttitude( q, s, qRef ); DrawSailAngles( s, qRef, cone, clock ); DrawSailFrames( qRef, cone, clock ) %-------------------------------------- % PSS internal file version information %--------------------------------------