Planar heliopause mission simulation.
Can use either a built-in specular sail force disturbance function or the
full sail disturbance function. Uses the FlatSail CAD model.
The sail characteristic acceleration is about 4.6e-6 km/s2.
Functions demonstrated:
RHSHelio2DOrbit
HeliopauseSailAngle
FlatPlate
Since version 7.
------------------------------------------------------------------------
See also Constant, Plot2D, TimeLabl, JD2000, HeliopauseSailAngle
------------------------------------------------------------------------
Contents
disturbModel = 1;
Load the flat plate model
d.g = load(fullfile('SailData','FlatSail.mat'));
d.g.component(1).v = 2*d.g.component(1).v;
Disturbance model data
d.distModel.aeroOn = 0;
d.distModel.albedoOn = 0;
d.distModel.solarOn = 1;
d.distModel.magOn = 0;
d.distModel.radOn = 0;
d.distModel.ggOn = 0;
d.distModel.planet = 'Sun';
d.jD0 = JD2000;
The maximum number of days for the numerical integration
maxDays = 365;
Constants
mu = Constant('mu sun');
aU = Constant('au');
lbFToN = Constant('lb force to n');
lbFToKg = Constant('lb force to kg');
c = Constant('speed of light')*1e3;
secInDay = 86400;
mToKm = 1/1000;
Build the data structure for the differential equations
d.tEnd = maxDays*secInDay;
d.mu = mu;
d.m0 = 100;
d.laserOn = 0;
The following are for the specular model only
area = 350*d.m0;
p = 1367;
d.accel = 2.0*(p/c)*area*mToKm*aU^2/d.m0;
Sail pointing angle function
d.sailAngleFun = 'HeliopauseSailAngle';
Select the disturance model
switch disturbModel
case 1
d.forceModel = 'specular';
otherwise
d.forceModel = 'full';
end
disp('HeliopauseSimulation:')
disp(['Disturbance type: ' d.forceModel])
HeliopauseSimulation:
Disturbance type: specular
Set up ode113
oDEOptions = odeset( 'abstol', 1e-12, 'reltol', 4e-8, 'events', 'off' );
Initial conditions. States are [r;dr/dt;drTheta/dt]
x = [aU;0;sqrt(d.mu/aU);0];
[t, x] = ode23('RHSHelio2DOrbit', [0, d.tEnd], x, oDEOptions, d );
x = x';
angle = HeliopauseSailAngle( x, t );
[t, tL] = TimeLabl( t' );
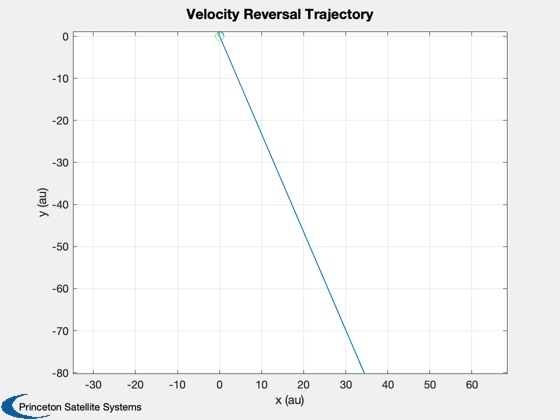
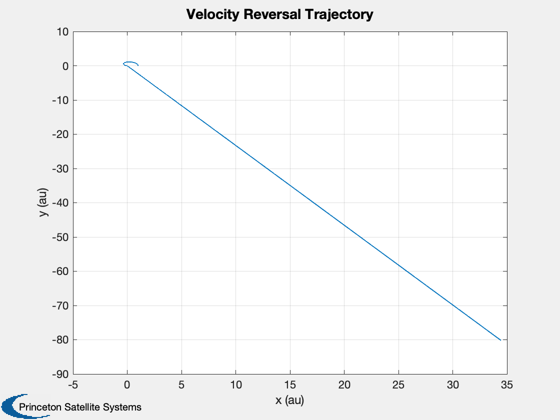
Plot the orbit
cA = cos( x(4,:) );
sA = sin( x(4,:) );
Plot2D( x(1,:).*cA/aU, x(1,:).*sA/aU, ['x (au)'], ['y (au)'],'Velocity Reversal Trajectory' )
hold on
Plot the initial orbit
th = linspace(0,2*pi);
plot(x(1,1)*cos(th)/aU,x(1,1)*sin(th)/aU,'g');
axis equal
hold off
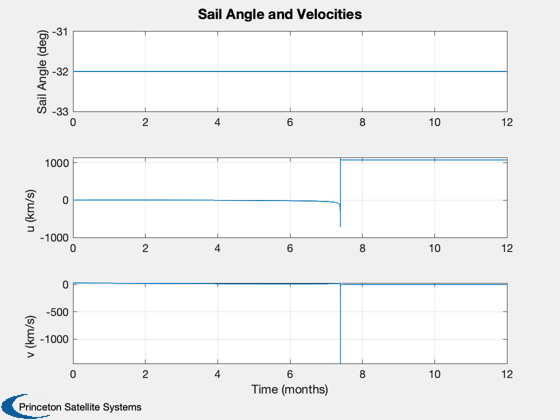
yL = {'Sail Angle (deg)' 'u (km/s)' 'v (km/s)'};
Plot2D( t, [angle*180/pi;x(2,:);x(3,:)], tL, yL, 'Sail Angle and Velocities' );