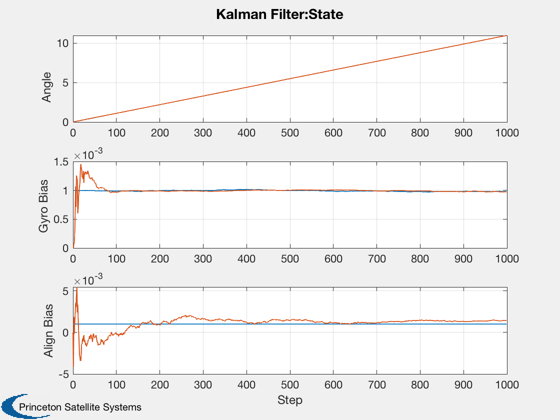
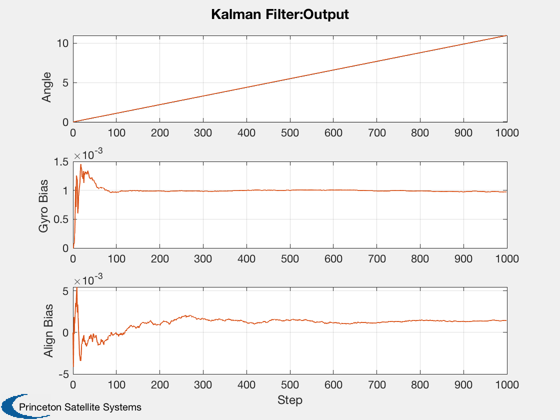
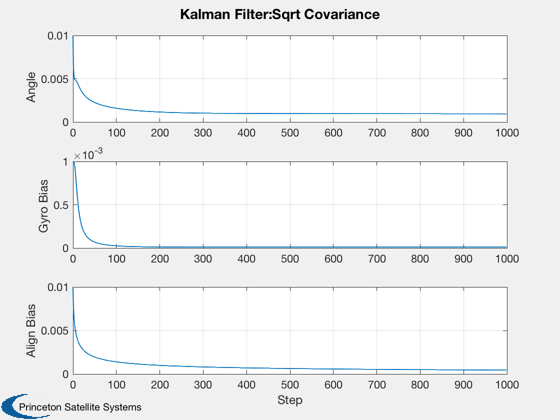
Demonstrate a Kalman Filter for a gyro based attitude determination system.
There are two angle measurements from sensors separated by an initially unknown bias. ------------------------------------------------------------------------- See also C2DZOH, KFilter, Plot2D -------------------------------------------------------------------------
Contents
%-------------------------------------------------------------------------- % Copyright (c) 2001 Princeton Satellite Systems, Inc. % All rights reserved. %--------------------------------------------------------------------------
State vector [angle;gyro bias;alignment bias]
a = [0 1 0;0 0 0;0 0 0]; b = [1;0;0]; c = [1 0 0;1 0 1]; d = [0;0]; dT = 1; [a, b] = C2DZOH( a, b, dT ); nSim = 1000; xPlot = zeros(3,nSim); ePlot = zeros(3,nSim); yPlot = zeros(2,nSim); zPlot = zeros(3,nSim); pPlot = zeros(3,nSim); omega = 0.01; gyroBias1Sigma = 1e-6; alignmentBias1Sigma = 1e-7; measurement1Sigma = 1e-2; angle1Sigma = 1e-5; x = [0;omega/10;0.001]; xEst = [0;0;0]; r = measurement1Sigma^2*eye(2); q = diag([angle1Sigma^2,gyroBias1Sigma^2,alignmentBias1Sigma^2]); p = diag([.01;.001;.01].^2); z = zeros(3,1); for k = 1:nSim y = c*x + measurement1Sigma*randn(2,1); xPlot(:,k) = x; ePlot(:,k) = xEst; yPlot(:,k) = y; zPlot(:,k) = z; pPlot(:,k) = sqrt(diag(p)); [xEst, p, g, z, pY] = KFilter( r, a, q, c, xEst, y, p, [], b*omega ); x = a*x + b*omega + [angle1Sigma;gyroBias1Sigma;alignmentBias1Sigma].*randn(3,1); end n = 0:(nSim-1); yLbl = {'Angle','Gyro Bias','Align Bias'}; Plot2D(n,[xPlot;ePlot],'Step',yLbl,'Kalman Filter:State','lin',['[1 4]';'[2 5]';'[3 6]']) Plot2D(n,[zPlot;ePlot],'Step',yLbl,'Kalman Filter:Output','lin',['[1 4]';'[2 5]';'[3 6]']) Plot2D(n,pPlot,'Step',yLbl,'Kalman Filter:Sqrt Covariance') %--------------------------------------